Trong kỷ nguyên tiến tới tự động hóa toàn phần, cánh tay robot đã trở thành công cụ không thể thiếu của mọi dây truyền sản xuất hiện đại. Từ việc nâng đỡ hàng tấn vật liệu cho đến lắp ráp những linh kiện siêu nhỏ với độ chính xác tuyệt đối, các loại cánh tay robot được thiết kế để đáp ứng đa dạng các nhu cầu tự động hóa.

Trong bài viết này, VNTECH sẽ cung cấp cái nhìn tổng quan về các loại cánh tay robot phổ biến nhất hiện nay.
Nội dung bài viết
Robot khớp nối (Articulated Robot)
Robot khớp nối là loại robot công nghiệp phổ biến nhất hiện nay, được thiết kế với cấu trúc mô phỏng theo cánh tay con người. Đặc điểm chính của chúng là sở hữu một chuỗi các khớp quay nối liền các phân đoạn của cánh tay, cho phép robot di chuyển linh hoạt trong không gian ba chiều.
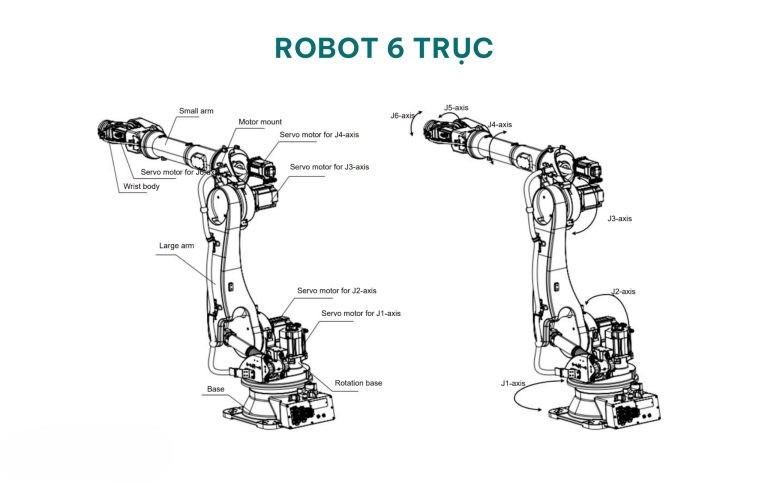
Phổ biến nhất là loại cánh tay robot 6 bậc tự do, với 6 khớp quay cho phép robot di chuyển và định hướng công cụ theo mọi hướng trong không gian 3D. Ngoài ra còn có các loại 4, 5, hoặc 7 trục tùy theo yêu cầu ứng dụng.
>>> Xem các cánh tay robot khớp nối:
- Cánh tay robot 6 bậc tự do
- Cánh tay robot 5 bậc tự do
- Cánh tay robot 4 bậc tự do
- Cánh tay robot 3 bậc tự do
– Không gian làm việc: Có không gian làm việc hình cầu hoặc bán cầu rộng lớn, cho phép robot tiếp cận một phạm vi lớn.
– Ưu điểm:
+ Đa năng nhất: Phù hợp cho hầu hết mọi ứng dụng công nghiệp, từ phức tạp đến đơn giản.
+ Linh hoạt cao: Có khả năng thực hiện các chuyển động phức tạp, uốn lượn, né tránh vật cản và tiếp cận các vị trí khó.
+ Dải tải trọng và tầm với rộng: Có thể xử lý vật liệu từ vài kg (robot mini, cobot) đến hàng tấn (robot hạng nặng) với tầm với đa dạng.

– Nhược điểm:
+ Động học phức tạp, việc lập trình có thể khó khăn hơn so với các loại khác.
+ Chi phí đầu tư ban đầu thường cao hơn.
– Ứng dụng tiêu biểu: Hàn (hồ quang, điểm), lắp ráp phức tạp, phun sơn, xử lý vật liệu (gắp đặt, cấp phôi), gia công (mài, đánh bóng), kiểm tra chất lượng.
>>> Xem các cánh tay robot tự động:
- Cánh tay robot hàn tự động
- Robot gắp hàng, xếp dỡ sản phẩm
Chính nhờ cấu trúc linh hoạt này, robot khớp nối có thể tiếp cận một không gian làm việc rộng và thực hiện các tác vụ phức tạp. Chúng là xương sống của tự động hóa trong nhiều ngành công nghiệp, từ sản xuất ô tô, điện tử đến logistics và y tế.
Cánh tay robot SCARA
Robot SCARA là một loại robot công nghiệp đặc trưng bởi khả năng di chuyển nhanh chóng và chính xác trong mặt phẳng ngang, đồng thời duy trì độ cứng vững đáng kinh ngạc theo chiều dọc. SCARA viết tắt của Selective Compliance Assembly Robot Arm – khả năng tuân thủ chọn lọc.
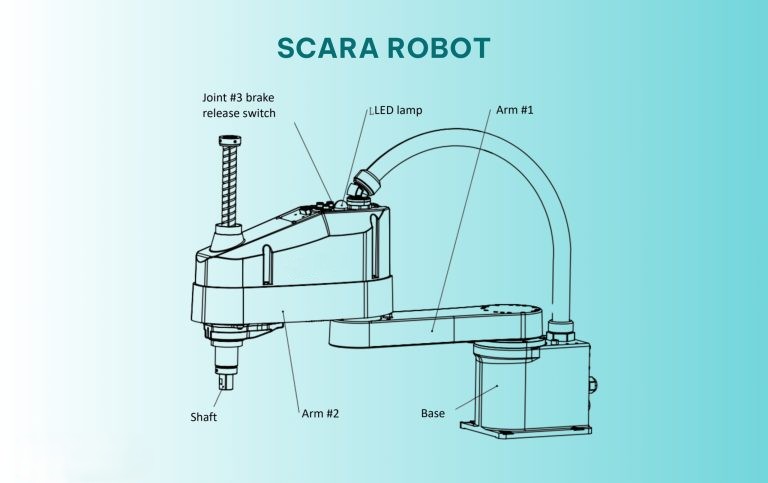
Robot SCARA có độ cứng cao khi chịu lực theo phương thẳng đứng (trục Z), rất lý tưởng cho các tác vụ như: ép, nhấn, vặn vít mà không bị rung lắc hay biến dạng. Nó cũng cực kỳ linh hoạt và dễ dàng di chuyển theo phương ngang (trục X-Y).
Về cấu tạo, robot SCARA thường có 4 bậc tự do (4 trục):
– Hai khớp quay song song trong mặt phẳng ngang.
– Một trục tịnh tiến theo chiều dọc (trục Z).
– Một khớp quay ở cổ tay để xoay công cụ.
– Không gian làm việc: Hình trụ.
– Ưu điểm:
+ Tốc độ cao: Cực kỳ nhanh trong các tác vụ di chuyển và gắp đặt trong mặt phẳng ngang.
+ Độ chính xác và độ lặp lại vượt trội: Đặc biệt là ở trục Z (lý tưởng cho các tác vụ ép, nhấn, vặn vít).
+ Nhỏ gọn: Kích thước khiêm tốn, dễ dàng tích hợp vào không gian làm việc hạn chế.
+ Lập trình tương đối dễ dàng.
– Nhược điểm:
+ Hạn chế về linh hoạt 3D (không thể định hướng công cụ ở nhiều góc độ phức tạp).
+ Tải trọng thường ở mức thấp đến trung bình.
– Ứng dụng tiêu biểu: Lắp ráp linh kiện điện tử (PCB, điện thoại), gắp và đặt tốc độ cao, đóng gói, phân loại, vặn vít.
>>> Xem thêm: 10 ngành công nghiệp có thể ứng dụng cánh tay robot

Chính nhờ sự kết hợp độc đáo này, robot SCARA trở thành lựa chọn hàng đầu cho các ứng dụng đòi hỏi sự tỉ mỉ và tốc độ cao trong một không gian làm việc giới hạn, đặc biệt là trong ngành lắp ráp và gắp đặt linh kiện.
Cánh tay robot Delta (Robot Nhện)
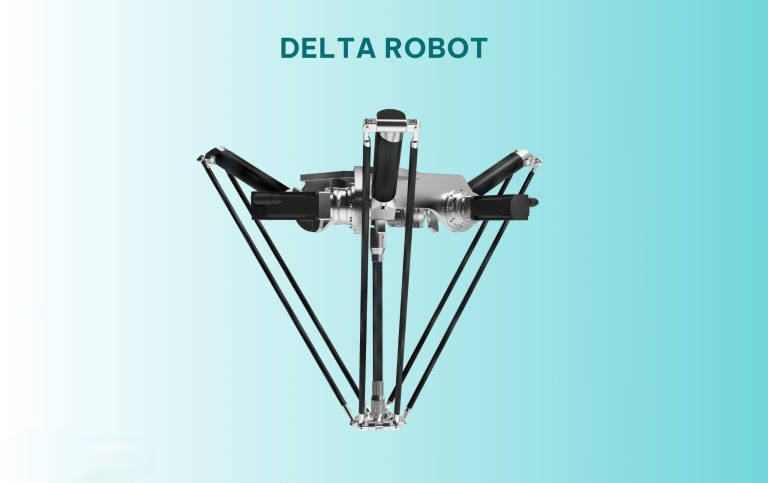
Robot Delta hay Robot Nhện là một loại robot công nghiệp đặc biệt, nổi bật với khả năng di chuyển và gắp đặt vật phẩm với tốc độ cực kỳ cao. Điểm nhận dạng chính của Robot Delta là cấu trúc động học song song độc đáo:
+ Robot có một khung cố định ở trên cao, nơi đặt tất cả các động cơ.
+ Ba (hoặc bốn) cánh tay nhẹ, làm bằng vật liệu rỗng như sợi carbon, kết nối từ khung cố định xuống một nền tảng di động ở phía dưới.
+ Bộ kẹp hoặc giác hút được gắn ở nền tảng di động này.
+ Động cơ được đặt cố định ở khung trên, giúp các cánh tay nhẹ di chuyển nền tảng với quán tính thấp.
– Không gian làm việc: Hình nón hoặc hình bán cầu nhỏ.
– Ưu điểm:
+ Tốc độ siêu tốc, có thể thực hiện hàng trăm lần mỗi phút.
+ Độ chính xác và độ lặp lại cực cao.
+ Trọng lượng nhẹ, quán tính thấp, an toàn khi dừng khẩn cấp.
+ Thiết kế vệ sinh, phù hợp ngành thực phẩm và dược phẩm.
– Nhược điểm:
+ Tải trọng rất thấp (thường dưới 10 kg).
+ Không gian làm việc bị giới hạn trong phạm vi hình nón.
+ Động học phức tạp hơn so với SCARA hay Cartesian, lập trình có thể khó.
– Ứng dụng tiêu biểu: Đóng gói tốc độ cao, phân loại sản phẩm nhẹ (thực phẩm, bánh kẹo), gắp và đặt hàng loạt trong ngành dược phẩm.

Cánh tay robot Cartesian
Robot Cartesian là một loại robot công nghiệp hoạt động dựa trên hệ tọa độ Descartes, nghĩa là chúng di chuyển theo các trục thẳng (X, Y, Z) vuông góc với nhau. Hãy tưởng tượng một cần cẩu lớn di chuyển trên đường ray theo ba hướng: tiến/lùi, sang trái/phải, và lên/xuống – đó chính là nguyên lý cơ bản của robot Cartesian.

Mỗi trục của robot Cartesian được điều khiển độc lập bằng một động cơ servo, cho phép đầu cuối của robot di chuyển đến bất kỳ vị trí nào trong một không gian làm việc có hình hộp chữ nhật.
– Cấu tạo: Có thể có 1, 2, hoặc 3 trục tịnh tiến, hoặc nhiều hơn nếu có thêm khớp quay ở cổ tay.
– Không gian làm việc: Hình hộp chữ nhật (có thể mở rộng rất lớn).
– Ưu điểm:
+ Độ chính xác và độ lặp lại cực cao: Đặc biệt cho các chuyển động tuyến tính trên đường thẳng.
+ Khả năng chịu tải rất lớn: Cấu trúc cứng vững cho phép xử lý vật liệu và công cụ rất nặng.
+ Không gian làm việc có thể mở rộng linh hoạt: Dễ dàng kéo dài các trục để tăng phạm vi hoạt động.
+ Lập trình đơn giản nhất do hoạt động trong hệ tọa độ trực quan X, Y, Z.
– Nhược điểm:
+ Hạn chế linh hoạt (không thể thực hiện các đường cong phức tạp hoặc tiếp cận vị trí khuất).
+ Tốc độ thường không cao bằng các loại khác cho cùng tác vụ.
+ Chiếm nhiều không gian vật lý (khung).
– Ứng dụng tiêu biểu: Cắt laser/plasma, in 3D quy mô lớn, phun sơn trên bề mặt phẳng, xử lý vật liệu nặng, kiểm tra chất lượng trên diện rộng.

Robot Cộng Tác (Cobot)
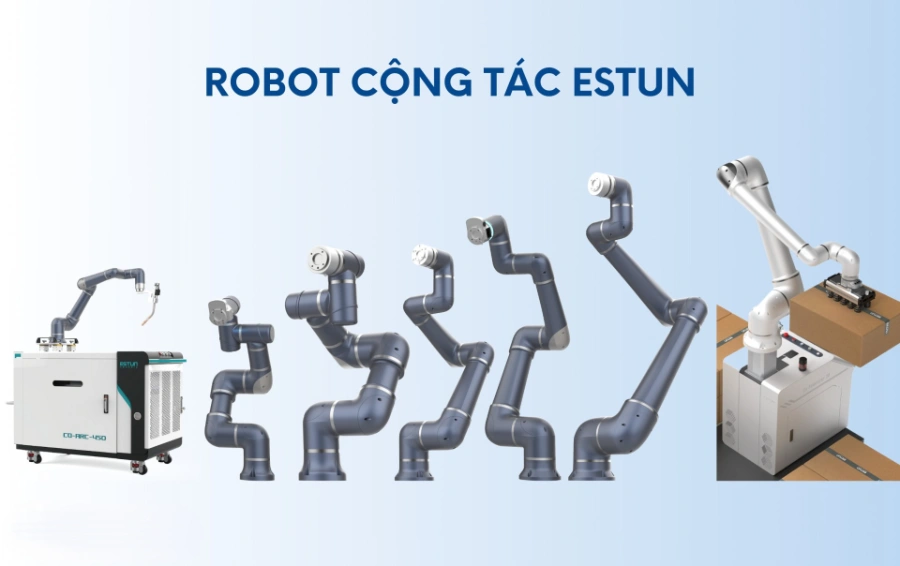
Robot cộng tác (Cobot) là một loại robot công nghiệp tiên tiến được thiết kế để làm việc trực tiếp và an toàn cùng với con người trong một không gian làm việc chung, mà không cần đến hàng rào bảo vệ vật lý như robot công nghiệp truyền thống.

Robot cộng tác thường là robot khớp nối (6 hoặc 7 trục), nhưng được trang bị các công nghệ an toàn tiên tiến như cảm biến lực/mô-men xoắn, chức năng dừng an toàn, và giới hạn tốc độ/lực.
– Không gian làm việc: Chia sẻ với con người.
– Ưu điểm:
+ Phát hiện va chạm và dừng ngay lập tức khi tiếp xúc với con người.
+ Có giao diện trực quan, cho phép “dạy” robot bằng cách di chuyển trực tiếp cánh tay của nó (hand-guiding).
+ Dễ dàng triển khai, tái cấu hình và di chuyển giữa các trạm làm việc.
+ Giúp con người thoát khỏi các công việc lặp lại, tẻ nhạt hoặc nguy hiểm, tập trung vào công việc có giá trị cao hơn.
– Nhược điểm:
+ Tốc độ và tải trọng thường thấp hơn robot công nghiệp truyền thống tương ứng.
+ Chi phí có thể cao hơn robot truyền thống cùng loại.
– Ứng dụng tiêu biểu: Hỗ trợ lắp ráp, kiểm tra chất lượng, gắp và đặt nhẹ, vận hành máy, đóng gói trong môi trường cần sự cộng tác giữa người và máy.
Robot Cylindrical (Robot Trụ)
Robot Cylindrical là một loại robot công nghiệp có các khớp tạo ra một không gian làm việc có hình dạng của một hình trụ. Đặc điểm chính của robot Cylindrical là sự kết hợp của các khớp:
– Một khớp quay ở đế: Cho phép toàn bộ cánh tay robot xoay quanh trục thẳng đứng.
– Một khớp tịnh tiến dọc: Cho phép cánh tay nâng lên hoặc hạ xuống theo chiều thẳng đứng.
– Một khớp tịnh tiến ngang: Cho phép cánh tay vươn ra hoặc thu vào theo chiều ngang.

Cấu hình này tạo ra một không gian làm việc hình trụ, cho phép robot thực hiện các chuyển động theo các trục chính một cách chính xác: gắp – đặt, lắp ráp đơn giản, hoặc vận hành máy công cụ.
– Không gian làm việc: Hình trụ.
– Ưu điểm:
+ Cấu trúc tương đối đơn giản và cứng vững.
+ Lập trình dễ dàng hơn robot khớp nối phức tạp.
+ Tốt cho các tác vụ trong không gian hẹp, thẳng, hoặc cần tiếp cận các vị trí sâu.
– Nhược điểm:
+ Hạn chế linh hoạt hơn so với robot khớp nối.
+ Không gian làm việc không được tối ưu như SCARA hay Cartesian.
– Ứng dụng tiêu biểu: Gắp đặt trong không gian hẹp, lắp ráp đơn giản, vận hành máy công cụ.
Robot Spherical (Robot Cầu / Robot Pola)
Robot Spherical (Robot Cầu) là một loại robot công nghiệp có các khớp được sắp xếp để tạo ra một không gian làm việc có hình dạng của một quả cầu hoặc một phần của hình cầu. Tên gọi của nó xuất phát từ chính không gian làm việc này, được hình thành bởi sự kết hợp của các khớp quay.

Đặc điểm chính của robot Spherical là sự kết hợp của:
– Một khớp quay ở đế: Cho phép toàn bộ cánh tay robot xoay quanh trục thẳng đứng.
– Hai khớp quay khác: Các khớp này thường được bố trí vuông góc với nhau ở phần thân robot, cho phép cánh tay vươn ra xa hơn hoặc gập lại, và thay đổi độ cao.
Cấu hình này giúp robot có khả năng tiếp cận các điểm trong một không gian hình cầu, mặc dù khả năng định hướng công cụ ở đầu cuối có thể bị hạn chế so với robot khớp nối hiện đại.
– Không gian làm việc: Hình cầu.
– Ưu điểm:
+ Tầm với tốt trong không gian cầu.
+ Độ cứng vững tương đối.
– Nhược điểm:
+ Động học và lập trình phức tạp hơn các loại robot đơn giản.
+ Tải trọng và độ chính xác thường không cao bằng các loại robot hiện đại hơn.
+ Ngày nay ít phổ biến trong các ứng dụng mới do sự phát triển của robot khớp nối.
– Ứng dụng tiêu biểu: Trong lịch sử được dùng cho hàn điểm (spot welding), xử lý vật liệu.
Kết Luận:
Các loại cánh tay robot trên đều là giải pháp kỹ thuật tinh xảo được thiết kế để giải quyết những thách thức cụ thể trong sản xuất. Từ sự linh hoạt toàn diện của robot khớp nối, tốc độ “chớp nhoáng” của Robot Delta, độ chính xác của SCARA và Cartesian, đến khả năng cộng tác an toàn của Cobot, mỗi loại đều có vị trí không thể thay thế trong việc định hình nền công nghiệp 4.0.
Hãy liên hệ tới VNTECH để được tư vấn chi tiết về giải pháp tự động hóa phù hợp nhất với doanh nghiệp của bạn.
VNTECH - Đơn vị cung cấp máy móc gia công cơ khí chính hãng, uy tín, đa dạng về chủng loại, đáp ứng mọi nhu cầu sản xuất. Để được tư vấn chi tiết và nhận báo giá tốt nhất, quý khách vui lòng liên hệ theo thông tin bên dưới.

________________
THÔNG TIN LIÊN HỆ
- Địa chỉ văn phòng:
- Địa chỉ Hà Nội: NO-05A23 Khu TĐC Giang Biên, Ngõ 1 Nguyễn Khắc Viện, Phường Việt Hưng, Hà Nội
- Chi Nhánh Đà Nẵng: Lô 11, Khu A4, Nguyễn Sinh Sắc, Hoà Minh, Liên Chiểu, Đà Nẵng
- Chi Nhánh HCM: 43 Đường N2, KP Thống Nhất, Dĩ An, Bình Dương
- SĐT: 0984.537.333
- Email: sale@vntechcnc.vn
- Facebook: https://www.facebook.com/vntechcnc
- Website: https://thietbivntech.vn