Động cơ tốt nhất là động cơ đáp ứng được các yêu cầu của ứng dụng. Tuy nhiên, khi cả động cơ servo và động cơ bước đều đáp ứng được các yêu cầu cơ bản của ứng dụng định vị, điều quan trọng là phải hiểu sâu hơn về hai công nghệ này để đưa ra quyết định sáng suốt.
Trong bài đăng trên blog này, chúng tôi sẽ tóm tắt sự khác biệt giữa hệ thống động cơ servo và hệ thống động cơ bước. Hãy bắt đầu bằng cách so sánh nhanh hai công nghệ động cơ này.
| Động cơ bước |
Động cơ servo |
  |
|
| Ưu điểm |
Ưu điểm |
- Mô-men xoắn tốc độ thấp tốt
- Không điều chỉnh, không săn bắn
- Kích thước động cơ nhỏ gọn
- Hiệu quả về chi phí
|
- Mô-men xoắn tốc độ cao tốt
- Mô-men xoắn cực đại có sẵn
- Hoạt động liên tục
- Gói gọn nhiều chức năng
|
| Nhược điểm |
Nhược điểm |
- Mô-men xoắn tốc độ cao ít hơn
- Chu kỳ nhiệm vụ hạn chế
- Không có mô-men xoắn cực đại
- Thường chạy trong vòng hở
|
- Yêu cầu điều chỉnh
- Chỉ hoạt động với phản hồi
- Săn bắn
- Chi phí
|
Mặc dù cả động cơ servo và động cơ bước đều sử dụng nam châm vĩnh cửu trong rôto và cần mạch truyền động để hoạt động, nhưng có những khác biệt cơ bản trong thiết kế của chúng dẫn đến sự khác biệt về hiệu suất.
Có thể ra lệnh cho động cơ bước di chuyển đến một vị trí, dừng lại, sau đó giữ nguyên, trong khi động cơ servo cần “săn” vị trí mục tiêu bằng phản hồi của bộ mã hóa. Sự khác biệt lớn đầu tiên mà bạn sẽ nhận thấy là yêu cầu về bộ mã hóa của động cơ servo làm tăng chiều dài của động cơ.
Sự khác biệt lớn thứ hai là số cực. Các cực được thảo luận ở đây là “cực từ” và có thể được định nghĩa là cực từ bắc hoặc nam trên rôto. Các cực này cung cấp các điểm ổn định cụ thể mà từ thông từ stato sẽ tương tác với rôto.
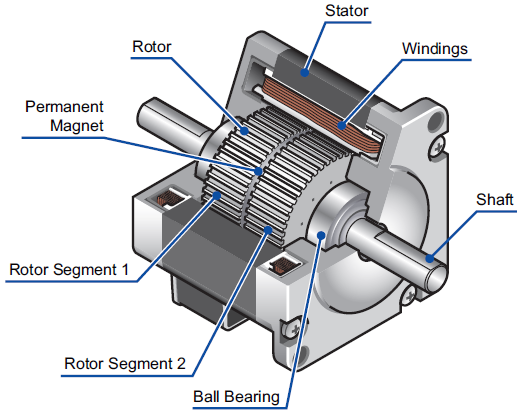
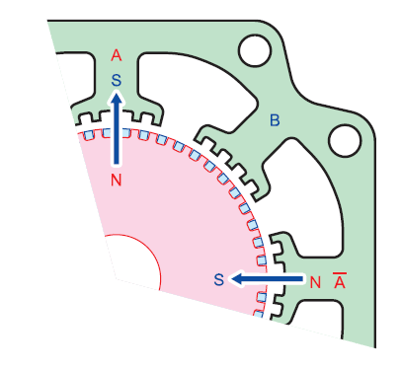
Để hiểu được sự khác biệt về số cực giữa động cơ bước và động cơ servo, chúng ta cần xem xét sâu hơn về thiết kế của từng động cơ. Hình ảnh bên trái bên dưới cho thấy cấu tạo của động cơ bước và hình ảnh bên phải bên dưới cho thấy sơ đồ mặt cắt ngang của rôto và stato của động cơ.
Động cơ bước
Thiết kế động cơ bước sử dụng nam châm vĩnh cửu đất hiếm từ hóa theo trục được kẹp giữa hai cốc rôto có răng. Bằng cách từ hóa theo trục nam châm vĩnh cửu, răng của hai cốc rôto trở thành cực từ có cực ngược nhau. Một cốc rôto có thể có 50 hoặc 100 răng và hai cốc rôto bị lệch ở nửa bước răng. Răng của cả hai rôto được hiển thị màu xanh lam và đỏ trong hình ảnh bên phải ở trên (nếu bạn nhìn từ phía trục). Đối với động cơ bước, mỗi răng trên cả hai cốc rôto đều trở thành một cực.
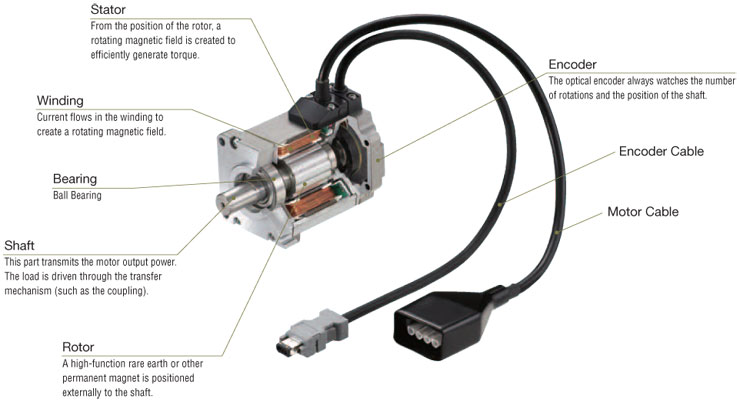
Động cơ servo

Động cơ servo (hiển thị ở trên) sử dụng rô-to từ hóa hướng tâm thay vì răng (hiển thị bên dưới), đây là lý do chính khiến động cơ servo có ít cực hơn đáng kể. Số lượng cực thấp cũng yêu cầu sử dụng phản hồi mã hóa để giảm thiểu lỗi.
|
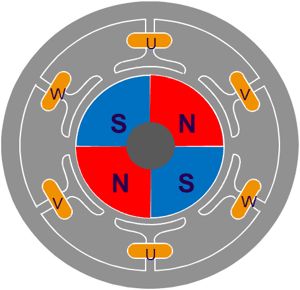
Thiết kế động cơ servo thường sử dụng rôto có 2~8 cực và stato 3 pha (U, V, W). Rôto của nó được từ hóa hướng tâm bằng nam châm vĩnh cửu phân đoạn thay vì từ hóa hướng trục như động cơ bước.
Ví dụ về rôto 4 cực với thiết kế stato 6 cực được hiển thị ở bên phải.
Như bạn có thể thấy, động cơ servo cung cấp ít cực hơn đáng kể so với động cơ bước do thiếu răng.
|
 |
Động cơ servo cần nhiều diện tích hơn do yêu cầu phải có bộ mã hóa tuyệt đối. Số lượng cực ít hơn giúp nó có khả năng tạo ra mô-men xoắn cao hơn ở tốc độ cao hơn. Động cơ bước có thể chạy trong vòng hở mà không cần bộ mã hóa, do đó nó nhỏ gọn hơn.
Đối với các ứng dụng định vị, một trong những yêu cầu chính mà chúng ta phải đáp ứng là độ chính xác dừng của động cơ. Cả động cơ bước và động cơ servo đều có thể dừng chính xác.
Độ chính xác dừng của động cơ bước phụ thuộc vào chất lượng sản xuất của các cuộn dây (điện) và cấu trúc răng (cơ học), trong khi độ chính xác của động cơ servo phụ thuộc vào độ chính xác lắp ráp, độ phân giải của bộ mã hóa và thuật toán.
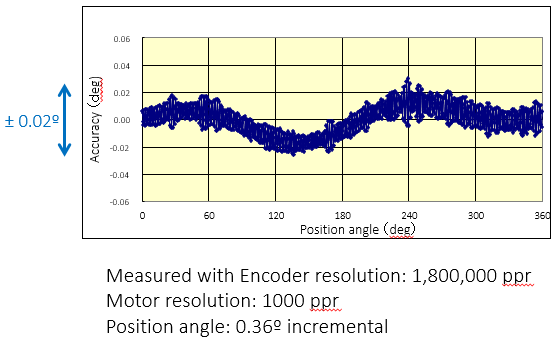
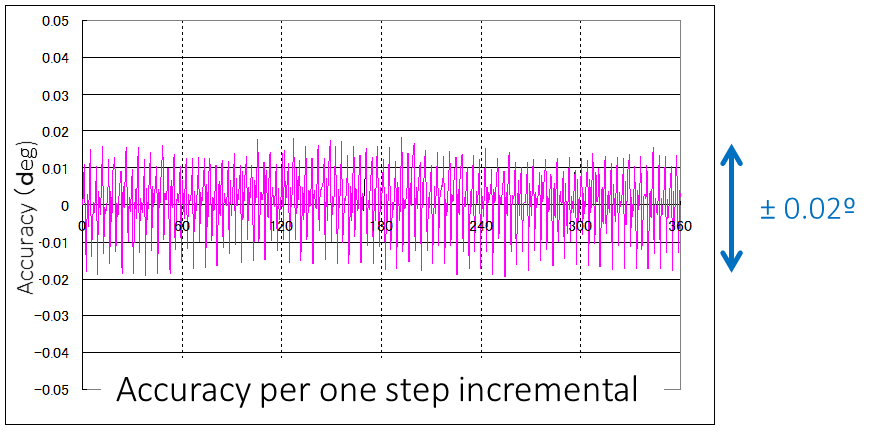
Hãy nhớ rằng có một khe hở không khí rất mỏng giữa rôto và stato, và lực ma sát duy nhất là từ ổ bi của nó. Mô-men xoắn ma sát hoặc tải trọng hấp dẫn có thể khiến vị trí dừng thực tế bị lệch, do đó sẽ có một chút lỗi khi bạn di chuyển từ vị trí này sang vị trí khác. Khi chúng ta vẽ các lỗi xảy ra khi động cơ quay hết 1 vòng, chúng trông giống như biểu đồ bên dưới.
| Servo Motor |
Stepper Motor |
|
|
Lưu ý rằng cả hai đều cung cấp độ chính xác dừng khoảng +/-0,02°, thấp hơn thông số kỹ thuật độ chính xác dừng lặp lại thông thường của động cơ bước là 3 phút cung hoặc +/-0,05°. Trong khi động cơ bước cung cấp khả năng lặp lại tốt hơn ở mức tăng 7,2° hoặc khả năng lặp lại gần như hoàn hảo ở mức tăng 360°, thì độ chính xác dừng của động cơ servo phụ thuộc vào độ phân giải bộ mã hóa của nó.
Độ chính xác dừng của động cơ bước phụ thuộc rất nhiều vào đặc điểm quấn, độ chính xác của cấu trúc rôto cũng như số răng/cực trong rôto của nó. Độ chính xác dừng của động cơ servo phụ thuộc vào độ chính xác lắp ráp, độ phân giải bộ mã hóa và thuật toán vận hành. Theo một cách nào đó, bạn có thể nói rằng động cơ bước được “thiết kế cơ học” cho các ứng dụng định vị và động cơ servo được “thiết kế điện” cho các ứng dụng định vị.
Động cơ servo thường được biết đến là chạy ở tốc độ cao hơn động cơ bước. Điều này thực sự có nghĩa là động cơ servo sẽ tạo ra mô-men xoắn lớn hơn ở RPM được chỉ định so với động cơ bước. Sự khác biệt về hiệu suất mô-men xoắn này xuất phát từ sự khác biệt về số cực cũng như độ tự cảm của cuộn dây giữa thiết kế động cơ servo và động cơ bước.
Số cực cũng ảnh hưởng đến số lần cuộn dây động cơ cần được đẩy lên để động cơ quay hết một vòng. Đối với động cơ servo, chỉ cần 12 “bước” để quay hết một vòng. Tuy nhiên, động cơ bước 2 pha cần 200 “bước”. Ở tốc độ thấp, điều này không tạo ra sự khác biệt đáng kể. Tuy nhiên, ở tốc độ cao, bộ điều khiển sẽ không thể cấp điện đầy đủ cho các cuộn dây. Vì dòng điện tỷ lệ thuận với mô-men xoắn nên mô-men xoắn giảm ở tốc độ cao.
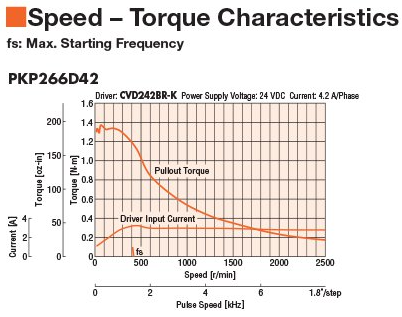
Sự khác biệt về hiệu suất giữa động cơ bước và động cơ servo có thể được thể hiện rõ nhất qua đường cong tốc độ-mô-men xoắn của chúng. Sau đây là ví dụ so sánh động cơ bước và động cơ servo có cùng kích thước khung.
| NEMA 23 Stepper Motor |
200 W (1/4 HP) 60 mm Servo Motor |
|
|
Số lượng cực cao của động cơ bước cho phép chúng tạo ra lực khởi động cao và chạy trơn tru ở tốc độ thấp. Chúng có thể phản ứng nhanh, định vị chính xác mà không cần bộ mã hóa và dễ dàng tạo ra mô-men xoắn giữ. Tuy nhiên, do độ tự cảm quấn cao, số lượng cực và hằng số L/R, mô-men xoắn giảm ở vùng tốc độ cao. Số lượng cực thấp và độ tự cảm quấn thấp của động cơ servo không tạo ra mô-men xoắn khởi động cao nhưng cho phép chúng duy trì mô-men xoắn tốt hơn trong toàn bộ phạm vi tốc độ của nó.
Phản hồi vòng kín
Theo định nghĩa, động cơ servo phải hoạt động với điều khiển vòng kín và động cơ bước thường hoạt động với điều khiển vòng hở. Động cơ servo sử dụng phản hồi để điều khiển vị trí, tốc độ hoặc mô-men xoắn của động cơ. Động cơ bước được lệnh di chuyển đến một vị trí cụ thể mà không cần phản hồi nhưng có thể mất tính đồng bộ do quá tải.
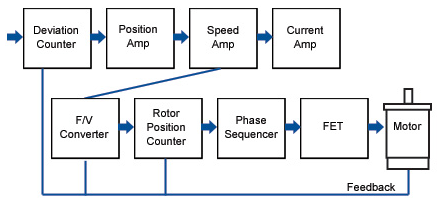
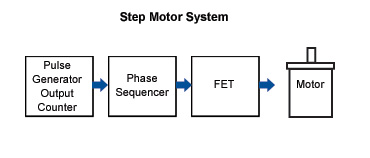
Việc bổ sung phản hồi để duy trì tính đồng bộ làm phức tạp thiết kế trình điều khiển và làm tăng số lượng thành phần. Ngoài bộ tạo xung, bộ sắp xếp pha và FET từ hệ thống động cơ bước thông thường, hệ thống động cơ servo còn chứa bộ đếm vị trí rôto, bộ chuyển đổi F/V, bộ khuếch đại dòng điện, bộ khuếch đại tốc độ, bộ khuếch đại vị trí và bộ đếm độ lệch. Tất cả các thành phần này đều cần thiết để chạy động cơ trong vòng lặp PID, trong đó trình điều khiển liên tục tính toán lỗi và điều chỉnh độ lợi tỷ lệ/tích phân/đạo hàm để hiệu chỉnh ngay lập tức. Đây là lý do tại sao động cơ servo đắt hơn và cần thời gian xử lý.
| Servo Motor System |
Stepper Motor System |
|
|
Cùng với phản hồi vòng kín, tỷ lệ quán tính tải trên rôto của động cơ cũng tăng lên. Động cơ bước có thể xử lý khoảng 10 lần quán tính rôto của nó, trong khi động cơ servo có thể xử lý 100 lần quán tính rôto của nó. Để so sánh, động cơ bước vòng kín có thể xử lý 30 lần quán tính rôto của nó.
Động cơ bước hoạt động mà không cần phản hồi, vì vậy chúng cần ít thành phần hơn để hoạt động. Đây là lý do tại sao chúng tiết kiệm chi phí hơn. Động cơ servo yêu cầu phản hồi và hoạt động trong vòng lặp PID, do đó cần nhiều thành phần hơn.
Hiệu suất
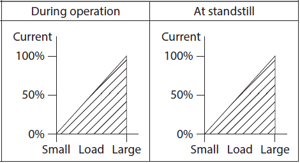
Động cơ bước sử dụng công nghệ trình điều khiển cắt dòng điện, cung cấp nguồn cung cấp dòng điện không đổi bất kể tải. Dòng điện tỷ lệ thuận với nhiệt độ, vì vậy chu kỳ hoạt động của động cơ bước cần được giới hạn ở khoảng 50%. Động cơ servo cung cấp khả năng kiểm soát dòng điện hiệu quả hơn vì nó chỉ sử dụng dòng điện cần thiết. Một ưu điểm của động cơ bước là khả năng tạo mô-men xoắn giữ ở tốc độ bằng không. Động cơ servo sử dụng nhiều điện năng hơn để tạo mô-men xoắn giữ.
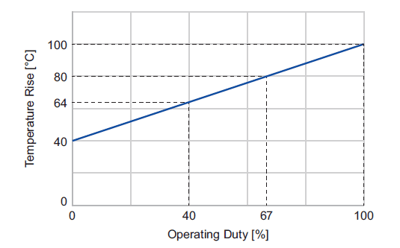
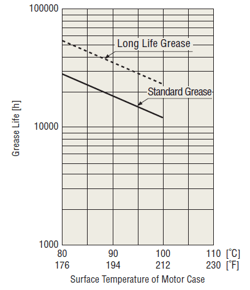
Phản hồi vòng kín cũng cho phép kiểm soát dòng điện hiệu quả hơn, ảnh hưởng đến nhiệt độ động cơ và tuổi thọ sử dụng. Trong biểu đồ bên dưới, chúng tôi vẽ biểu đồ tăng nhiệt độ so với chu kỳ hoạt động [%] của động cơ. Lưu ý cách nhiệt độ tăng theo chu kỳ hoạt động. Đây là lý do tại sao chu kỳ hoạt động cần được giới hạn đối với động cơ bước. Tuổi thọ của động cơ được xác định bởi tuổi thọ mỡ bôi trơn ổ trục và tuổi thọ mỡ bôi trơn ổ trục phụ thuộc vào nhiệt độ.
Kiểm soát dòng điện hiệu quả cũng có thể dẫn đến các lợi ích về hiệu suất khác, chẳng hạn như tiếng ồn và độ rung thấp hơn. Ngoài ra, hãy định cỡ động cơ phù hợp. Động cơ bước có xu hướng rung nhiều hơn khi không được định cỡ phù hợp. Động cơ servo có xu hướng “săn” nhiều hơn nếu không được định cỡ hoặc điều chỉnh phù hợp.
Khả năng chỉ rút dòng điện cần thiết là một lợi thế lớn của hệ thống động cơ servo, cũng có thể giúp tăng tuổi thọ, giảm tiếng ồn cho một số ứng dụng nhất định hoặc giảm mức tiêu thụ điện năng. Để động cơ bước cung cấp cùng loại khả năng kiểm soát dòng điện hiệu quả, nó sẽ cần khép kín vòng lặp.
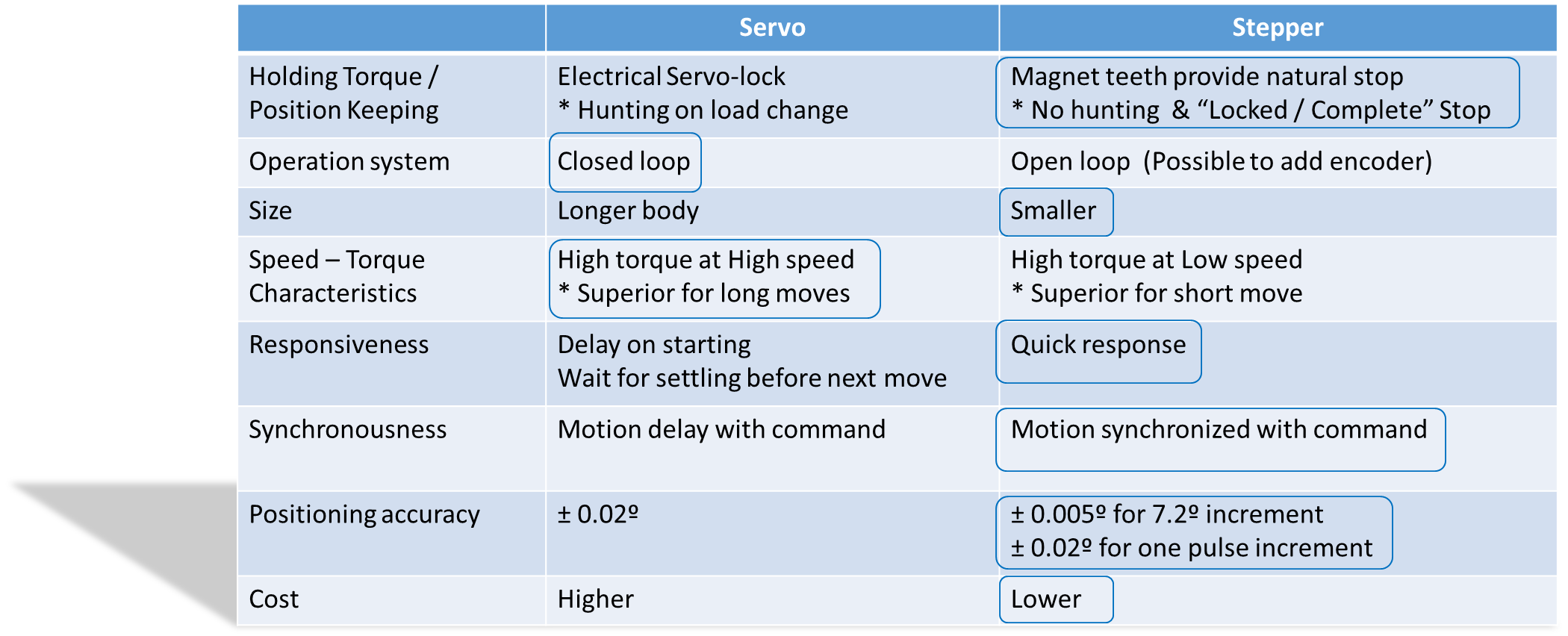
Tóm tắt
Để giúp lựa chọn sản phẩm, chúng tôi đã biên soạn danh sách các điểm khác biệt giữa servo và động cơ bước.