Cánh tay robot đã trở thành một mắt xích không thể thiếu trong dây truyền sản xuất của nhiều doanh nghiệp. Tuy nhiên, việc lựa chọn số trục của robot là yếu tố cực kỳ quan trọng cần được cân nhắc kỹ lưỡng. Từ những cánh tay robot 2 bậc đơn giản đến những cỗ máy tinh vi 6 trục, mỗi loại đều có những ưu và nhược điểm riêng, phù hợp với các ứng dụng khác nhau.

Trong bài viết này, VNTECH sẽ so sánh cánh tay robot 2 bậc với robot 3, 4, 5 & 6 bậc để các bạn có thể đưa ra lựa chọn phù hợp nhất với doanh nghiệp của mình.
Nội dung bài viết
Cánh tay robot 2 bậc tự do
Cánh tay robot 2 bậc là những robot cơ bản nhất, được thiết kế để thực hiện các chuyển động rất đơn giản và lặp đi lặp lại.
– Cấu tạo: Cánh tay robot 2 bậc tự do thường có cấu trúc đơn giản, chỉ cho phép di chuyển theo 2 hướng độc lập.
+ Ví dụ điển hình có thể là một robot Cartesian (cầu trục) chỉ di chuyển lên/xuống (trục Z) và tiến/lùi (trục X).
+ Hoặc một robot với hai khớp quay nối tiếp (R-R) trong cùng một mặt phẳng.

– Ưu điểm:
+ Chi phí thấp: Do cấu trúc và hệ thống điều khiển đơn giản, giá thành của robot 2 bậc tự do rất phải chăng.
+ Thiết kế đơn giản, dễ chế tạo và bảo trì.
+ Lập trình dễ dàng, trực quan và nhanh chóng.
+ Độ chính xác và độ cứng vững cao trong phạm vi giới hạn.
– Nhược điểm:
+ Chỉ có thể hoạt động trong một khu vực rất nhỏ và theo hai hướng cố định.
+ Chỉ thực hiện được các tác vụ cực kỳ cơ bản và lặp lại.
+ Không thể xử lý các vật thể có định hướng phức tạp.
– Ứng dụng: Robot 2 bậc tự do thường được sử dụng cho các tác vụ:
+ Gắp/đặt đơn giản trên một mặt phẳng cố định, ví dụ như di chuyển chi tiết từ điểm A sang điểm B.
+ Di chuyển vật liệu theo hai trục cơ bản trong các dây chuyền sản xuất đơn giản.
+ Các ứng dụng tự động hóa cấp thấp, yêu cầu sự lặp lại cực kỳ đơn giản và không có sự thay đổi về góc độ.

Cánh tay robot 3 bậc tự do
Cánh tay Robot 3 bậc tự do bổ sung thêm một chuyển động độc lập so với loại 2 bậc, cho phép công cụ cuối di chuyển tự do trong không gian 3D (X, Y, Z) nhưng vẫn giữ một định hướng cố định hoặc rất hạn chế.
Các cấu trúc phổ biến bao gồm robot Cartesian – ba trục tịnh tiến độc lập điều khiển vị trí, hoặc robot với ba khớp quay nối tiếp (R-R-R) nhưng không có khả năng xoay cổ tay để định hướng dụng cụ cuối.
– Ưu điểm:
+ Chi phí thấp hơn so với các loại có nhiều bậc tự do hơn.
+ Có thể di chuyển trong không gian 3D.
+ Nhanh và chính xác trong một số ứng dụng nhất định.
– Nhược điểm:
+ Hạn chế lớn về định hướng của công cụ cuối (End-effector). Nếu cần bắt một con vít vào một bề mặt nghiêng, robot 3 bậc sẽ không làm được.
+ Khó tiếp cận các vị trí phức tạp hoặc bị che khuất.
+ Không phù hợp cho các tác vụ cần xoay, nghiêng vật thể.
– Ứng dụng: Robot 3 bậc tự do thường được dùng cho:
+ Gắp/đặt trong không gian 3D: sắp xếp sản phẩm từ băng tải vào các ô khác nhau trong một hộp, hoặc xếp chồng các chi tiết.
+ Di chuyển vật thể đến các vị trí khác nhau dựa trên đặc điểm của chúng.
+ Các tác vụ nhẹ nhàng, không yêu cầu thay đổi góc độ công cụ như định vị cảm biến, phun xịt đơn giản theo phương cố định.
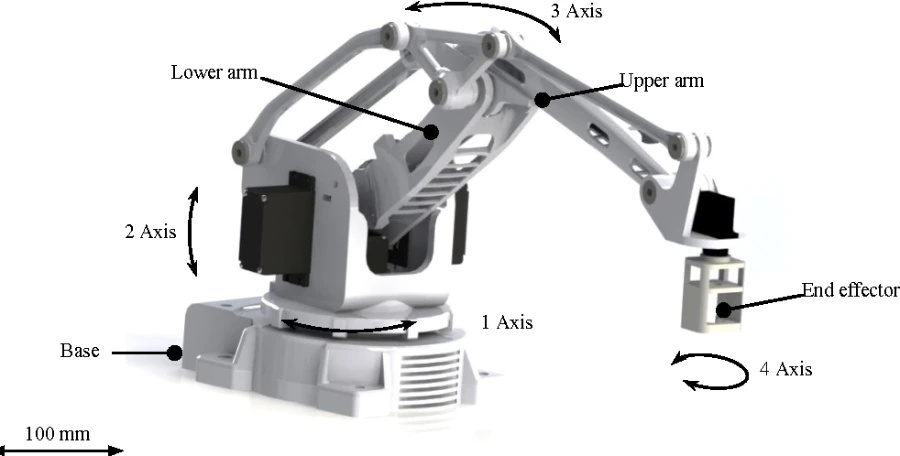
Cánh tay robot 4 bậc tự do
Cánh tay robot 4 bậc tự do phổ biến nhất là robot SCARA. Cấu trúc SCARA nổi bật với ba khớp quay nằm trong mặt phẳng ngang (XY) và một khớp tịnh tiến dọc (Z) kết hợp với khả năng xoay quanh trục Z tại cổ tay. Điều này cho phép robot di chuyển nhanh chóng trong mặt phẳng ngang và nhấc/đặt vật thể theo chiều thẳng đứng, đồng thời xoay chúng.
– Ưu điểm:
+ Robot SCARA rất nhanh và hiệu quả trong các tác vụ gắp/đặt và lắp ráp trên mặt phẳng ngang.
+ Khả năng tăng tốc và giảm tốc nhanh chóng là lợi thế lớn.
+ Độ chính xác và độ lặp lại cao, đặc biệt trong mặt phẳng ngang.
+ Đối với các tác vụ 2D hoặc 2.5D (có thêm trục Z), việc lập trình SCARA tương đối đơn giản và trực quan.
+ Khả năng xử lý vật thể theo định hướng Z và xoay quanh trục Z chính xác.

– Nhược điểm:
+ Mặc dù có trục Z, nhưng nó chỉ là một trục tịnh tiến đơn lẻ.
+ Robot không thể thay đổi góc nghiêng của công cụ cuối theo nhiều hướng (pitch và roll).
+ Không thể thực hiện các chuyển động xoay phức tạp.
+ Không phù hợp cho các ứng dụng yêu cầu tiếp cận từ nhiều góc độ.
– Ứng dụng: Robot 4 bậc tự do, đặc biệt là robot SCARA được ứng dụng rộng rãi trong:
+ Gắp/đặt tốc độ cao trong các dây chuyền lắp ráp linh kiện điện tử, dược phẩm, hoặc thực phẩm.
+ Lắp ráp chi tiết nhỏ vào bảng mạch, điện thoại, máy tính.
+ Đóng gói, sắp xếp sản phẩm vào hộp, palletize nhẹ.
+ Các ứng dụng trong ngành điện tử, dược phẩm, thực phẩm nơi yêu cầu tốc độ và độ sạch cao.

Cánh tay robot 5 bậc tự do
Cánh tay robot 5 bậc tự do bổ sung thêm một bậc tự do xoay cho công cụ cuối so với robot 4 bậc. Điều này giúp robot có thể xoay và nghiêng công cụ cuối theo 2 trục (thường là pitch và roll), kết hợp với ba bậc tự do vị trí (X, Y, Z).
– Ưu điểm:
+ Linh hoạt hơn đáng kể, khả năng định hướng của công cụ cuối được cải thiện rõ rệt.
+ Tiếp cận tốt hơn các vị trí nhất định: Có thể tiếp cận các điểm hàn, phun sơn từ nhiều góc độ hơn.
+ Phù hợp cho nhiều ứng dụng công nghiệp hơn.
– Nhược điểm:
+ Vẫn còn hạn chế trong việc tiếp cận không gian phức tạp.
+ Không thể xoay công cụ cuối theo mọi hướng một cách tự do như robot 6 bậc.
+ Không thể xoay tự do công cụ cuối theo mọi hướng.
– Ứng dụng:
+ Hàn điểm: Trong ngành ô tô, nơi cần đặt mỏ hàn vào nhiều điểm khác nhau với góc độ cố định.
+ Phun sơn, keo dán: Với các bề mặt có độ cong vừa phải, nơi cần thay đổi góc phun.
+ Gia công cơ bản: Mài, đánh bóng các bề mặt không quá phức tạp.
+ Lắp ráp các chi tiết có định hướng phức tạp hơn: Ví dụ, bắt vít vào các vị trí nghiêng.
+ Kiểm tra chất lượng: Di chuyển camera đến các góc độ khác nhau để kiểm tra sản phẩm.

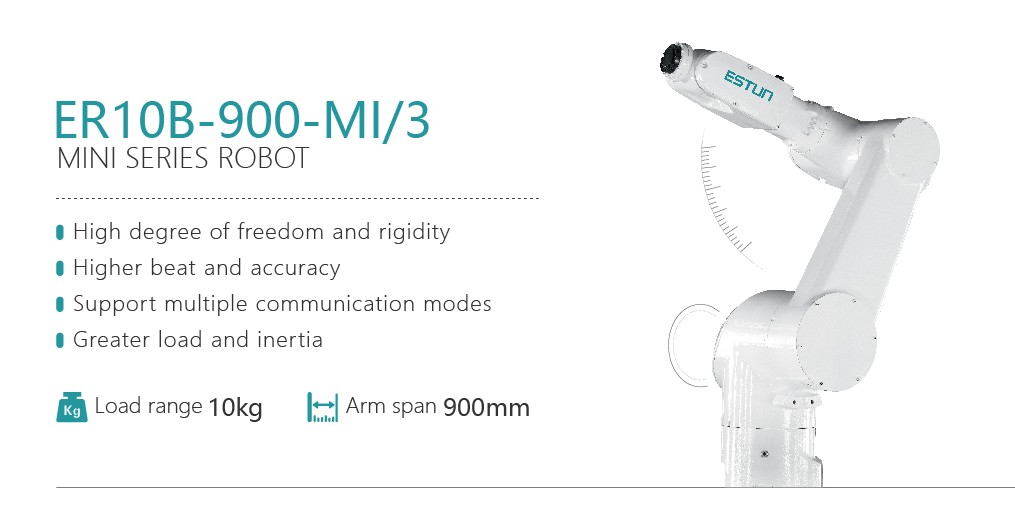
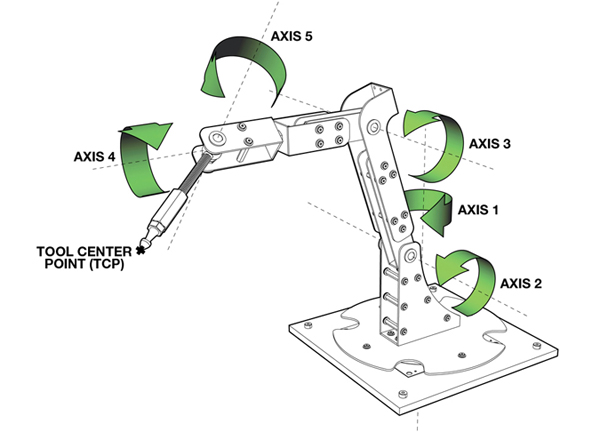
Cánh tay robot 6 bậc tự do
Cánh tay robot 6 bậc tự do – mỗi khớp cung cấp một bậc tự do. Sự kết hợp của 6 khớp này cho phép công cụ cuối có thể di chuyển đến bất kỳ vị trí nào trong không gian làm việc của robot (X, Y, Z) và đồng thời xoay theo mọi hướng.

– Ưu điểm:
+ Robot 6 bậc có khả năng tiếp cận hầu hết mọi vị trí trong không gian làm việc của nó.
+ Do tính linh hoạt cao, robot 6 bậc có thể thực hiện hầu hết mọi tác vụ công nghiệp.
+ Khả năng định tuyến lại đường đi một cách thông minh để tránh va chạm với các vật thể khác trong môi trường làm việc.
+ Phù hợp với môi trường làm việc chật hẹp, tiếp cận từ nhiều góc độ.
+ Khả năng mô phỏng và lập trình offline mạnh mẽ.
– Nhược điểm:
+ Chi phí cao nhất do cấu tạo phức tạp, nhiều khớp, động cơ.
+ Thiết kế phức tạp hơn, bảo trì khó hơn.
+ Lập trình phức tạp hơn.
+ Tốc độ có thể không bằng SCARA trong các tác vụ gắp/đặt 2D đơn giản.
– Ứng dụng:
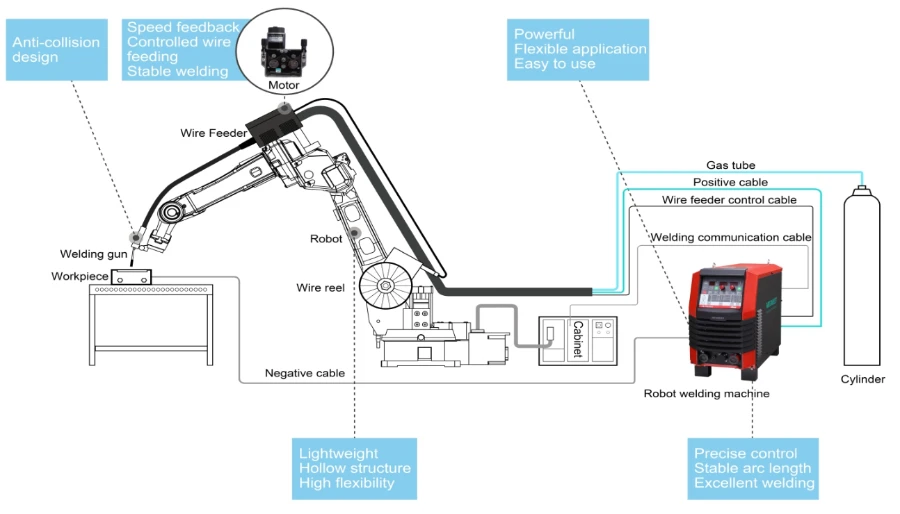
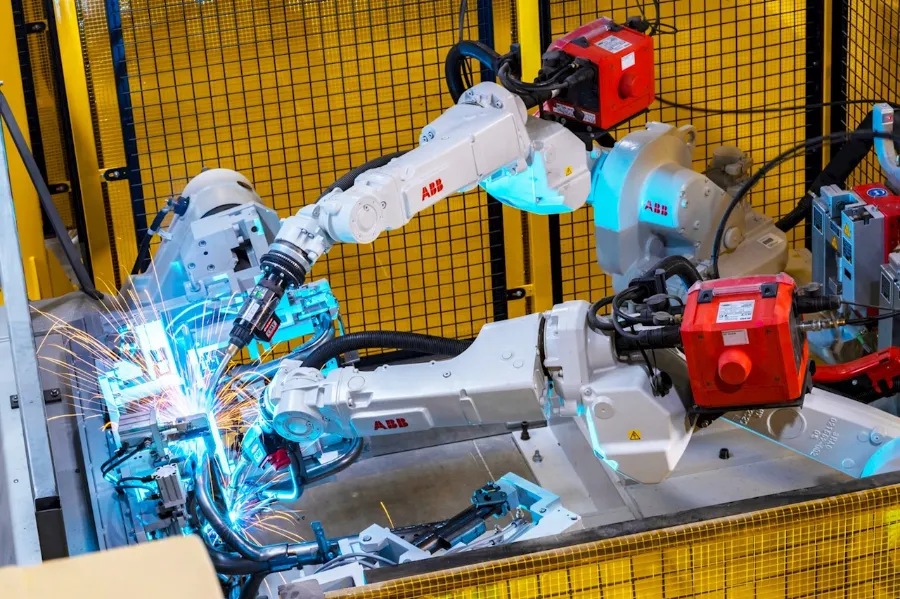
+ Hàn (MIG, TIG, Laser): Hàn đường phức tạp, hàn các chi tiết 3D, hàn trong các không gian hạn chế.
+ Cắt (Plasma, Laser, Waterjet): Cắt các hình dạng phức tạp trên các vật liệu cong hoặc có bề mặt 3D.
+ Lắp ráp phức tạp: Lắp ráp các chi tiết vào các vị trí khó, yêu cầu định hướng chính xác.
+ Gia công chính xác: Phay, mài, đánh bóng, chà nhám các bề mặt phức tạp.
+ Phun sơn, keo dán: Với độ phủ đều và chính xác trên các bề mặt có hình dạng bất kỳ.
+ Kiểm tra chất lượng: Di chuyển các đầu dò, camera kiểm tra tới mọi góc độ của sản phẩm.
+ Phục vụ máy: Nạp và lấy chi tiết ra khỏi máy gia công CNC, máy ép.
+ Xử lý vật liệu: Gắp, đặt, di chuyển các vật nặng hoặc có hình dạng phức tạp.

Kết luận:
1/ Khi nào dùng Robot 2 Trục:
– Tác vụ cực kỳ đơn giản và lặp lại.
– Ngân sách rất hạn chế.
– Yêu cầu độ chính xác cao trong 2 chiều.
2/ Khi nào dùng Robot 3 Trục:
– Tác vụ gắp và đặt trong không gian 3D.
– Di chuyển vật thể đến các thùng chứa khác nhau.
– Ngân sách eo hẹp nhưng cần không gian 3D.
3/ Khi nào dùng Robot 4 Trục (SCARA):
– Yêu cầu di chuyển nhanh chóng các chi tiết trên mặt phẳng ngang.
– Đặt linh kiện vào vị trí chính xác trên bảng mạch hoặc trong các cụm lắp ráp phẳng.
– Đóng gói, sắp xếp sản phẩm.
– Ngành điện tử, dược phẩm, thực phẩm.
– Ưu tiên tốc độ và độ chính xác trong mặt phẳng ngang hơn sự linh hoạt 3D toàn diện.
4/ Khi nào dùng Robot 5 Trục:
– Tác vụ yêu cầu định hướng công cụ cuối ở mức độ vừa phải.
– Hàn điểm, phun sơn/keo dán trên bề mặt cong nhẹ.
– Gia công cơ bản (mài, đánh bóng) các bề mặt không quá phức tạp.
5/ Khi nào dùng Robot 6 Trục:
– Tác vụ phức tạp, đòi hỏi linh hoạt tối đa.
– Hàn (MIG, TIG, Laser) đường phức tạp, hàn 3D, hoặc trong không gian hẹp.
– Cắt (Plasma, Laser, Waterjet) các hình dạng phức tạp trên vật liệu cong.
– Lắp ráp chi tiết phức tạp: Đặt linh kiện vào các vị trí khó, yêu cầu định hướng chính xác.
– Gia công chính xác: Phay, mài, đánh bóng các bề mặt phức tạp, nơi cần kiểm soát lực và góc độ công cụ.
– Phục vụ máy (Machine Tending): Nạp và lấy chi tiết từ các máy CNC, máy ép.
Hãy liên hệ ngay tới VNTECH để được tư vấn chi tiết giải pháp tự động phù hợp nhất với doanh nghiệp của bạn.
VNTECH - Đơn vị cung cấp máy móc gia công cơ khí chính hãng, uy tín, đa dạng về chủng loại, đáp ứng mọi nhu cầu sản xuất. Để được tư vấn chi tiết và nhận báo giá tốt nhất, quý khách vui lòng liên hệ theo thông tin bên dưới.

________________
THÔNG TIN LIÊN HỆ
- Địa chỉ văn phòng:
- Địa chỉ Hà Nội: NO-05A23 Khu TĐC Giang Biên, Ngõ 1 Nguyễn Khắc Viện, Phường Việt Hưng, Hà Nội
- Chi Nhánh Đà Nẵng: Lô 11, Khu A4, Nguyễn Sinh Sắc, Hoà Minh, Liên Chiểu, Đà Nẵng
- Chi Nhánh HCM: 43 Đường N2, KP Thống Nhất, Dĩ An, Bình Dương
- SĐT: 0984.537.333
- Email: sale@vntechcnc.vn
- Facebook: https://www.facebook.com/vntechcnc
- Website: https://thietbivntech.vn