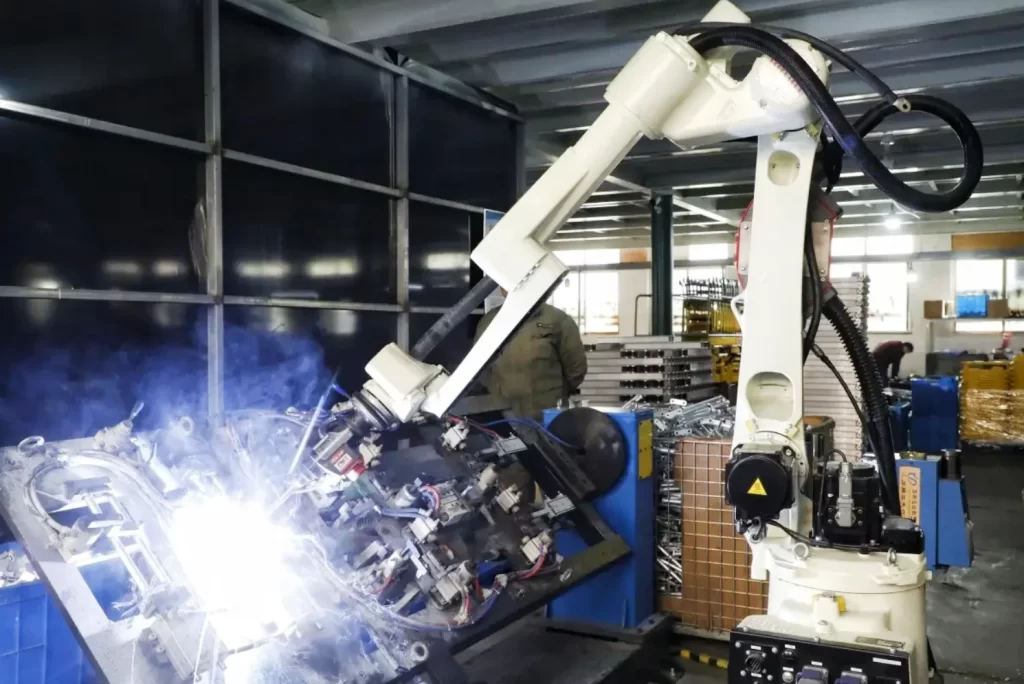
Robot hàn công nghiệp là một loại cánh tay robot tự động hay được sử dụng trong quá trình hàn: cả việc thực hiện các mối hàn và xử lý các bộ phận được hàn. Một hệ thống robot hàn hoàn chỉnh được cấu thành từ nhiều bộ phận chuyên biệt, mỗi bộ phận đóng một vai trò quan trọng trong việc đảm bảo chất lượng và hiệu suất làm việc.
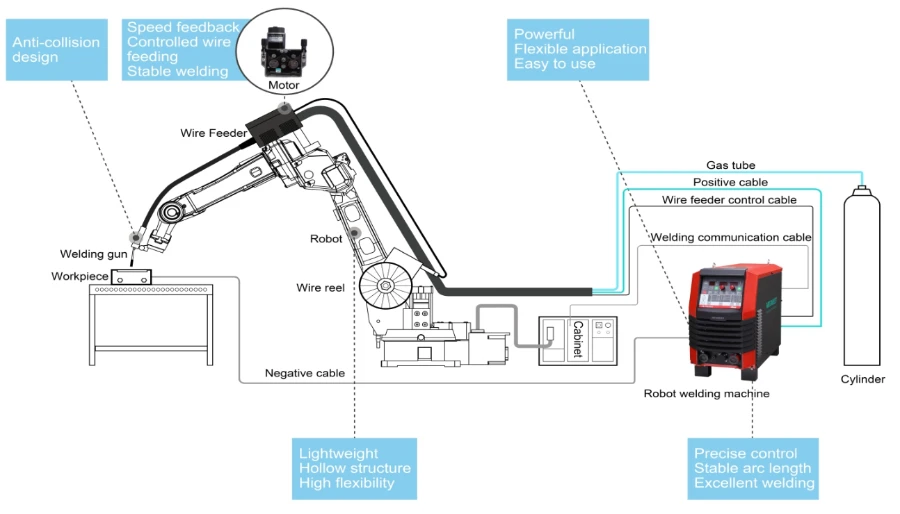
Trong bài viết này, VNTECH sẽ bóc tách 11 bộ phận của robot hàn để các bạn có thể hình dung được cấu tạo của một hệ thống robot hàn sẽ như thế nào.
Nội dung bài viết
- 1 Cánh tay Robot hàn (Welding Robot Arm)
- 2 Nguồn Hàn (Welding Power Source)
- 3 Mỏ Hàn, Súng Hàn (Welding Gun/Torch)
- 4 Bộ định vị phôi hàn
- 5 Cảm biến (Sensor)
- 6 Công cụ an toàn (Safety Tools)
- 7 Bộ điều khiển điện tử
- 8 Hệ thống làm sạch đầu hàn
- 9 Bộ cấp dây hàn tự động
- 10 Bộ định vị TCP
- 11 Thiết bị chống va chạm
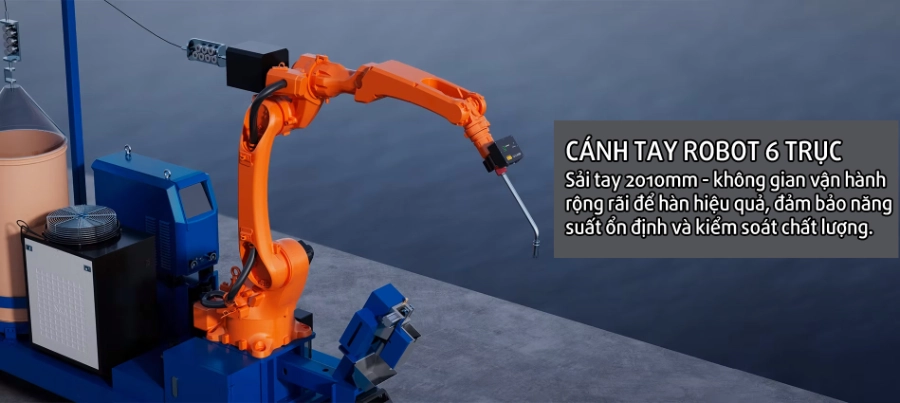
Cánh tay Robot hàn (Welding Robot Arm)
Cánh tay robot là bộ phận cơ khí chính của một hệ thống robot hàn, có vai trò thực hiện chuyển động và di chuyển mỏ hàn theo quỹ đạo đã lập trình.

1/ Đặc điểm cấu tạo
– Loại chuyển động: Thường là loại chuyển động đa trục hoặc chuyển động tuyến tính.
– Độ linh hoạt: Thiết kế bao gồm các khớp xoay rộng (thường là robot 6 bậc tự do), giúp tăng tính linh hoạt và phạm vi chuyển động của robot.
– Tầm với: Khoảng cách tối đa cánh tay có thể vươn tới.
– Tải trọng là trọng lượng tối đa (bao gồm cả mỏ hàn và dây dẫn) mà nó có thể mang theo trong suốt quá trình di chuyển.
>>> Xem thêm các loại cánh tay robot khác:

2/ Công dụng:
– Thực hiện chuyển động: Có nhiệm vụ di chuyển mỏ hàn đến đúng vị trí và quỹ đạo đã được lập trình trên phôi hàn.
– Tiếp cận mối hàn: Với các khớp xoay linh hoạt, robot hàn hồ quang dễ dàng tiếp cận các góc hàn khác nhau và ở bất kỳ vị trí nào.

– Xác định kích thước công việc:
+ Tầm với và tải trọng của cánh tay robot quyết định kích thước, trọng lượng của vật phẩm mà robot có thể hàn được.
– Đảm bảo độ chính xác: Cánh tay robot có độ chính xác lặp lại cực kỳ cao (±0.01 mm), đảm bảo mỗi đường hàn được thực hiện chính xác theo thông số kỹ thuật.
>>> Xem thêm: Máy hàn robot kết cấu thép LDR7 (7 trục)
Nguồn Hàn (Welding Power Source)
Nguồn hàn có nhiệm vụ cung cấp, kiểm soát năng lượng điện cần thiết để tạo ra và duy trì hồ quang hàn hoặc năng lượng nhiệt khác.
1/ Đặc điểm cấu tạo
– Là thiết bị điện tử có nhiệm vụ chính là tạo ra điện năng (dòng điện hoặc điện áp) để sinh nhiệt cho quá trình hàn.
– Nguồn hàn phải có công suất và điện áp phù hợp để đáp ứng yêu cầu cụ thể của quy trình hàn (ví dụ: hàn MIG, hàn TIG, hàn laser,…).

2/ Công dụng:
– Tạo ra dòng điện hoặc điện áp cần thiết để duy trì hồ quang điện hoặc năng lượng nhiệt khác.
– Kiểm soát chất lượng mối hàn:
+ Giảm bắn tóe: Ví dụ, nguồn ESTUN EC350iL có thể giảm bắn tóe tới 80% so với nguồn hàn thường.
+ Kiểm soát nhiệt: Giảm ảnh hưởng nhiệt tới mối hàn (10 – 20%).
+ Điều chỉnh chính xác: Xử lý tín hiệu tốc độ cao để điều chỉnh chính xác quá trình chuyển dịch kim loại khi hàn hồ quang.
– Bảo vệ và ổn định:
+ Đảm bảo đầu ra thông số hàn luôn ổn định ngay cả trong những điều kiện khắc nghiệt.
+ Có cấp bảo vệ cao (ví dụ: IP23S) giúp máy làm việc ổn định lâu dài.
– Tích hợp hệ thống: Cho phép cài đặt, lưu trữ quy trình hàn và giao tiếp với các loại robot công nghiệp thông qua các giao thức (ví dụ: CANopen).
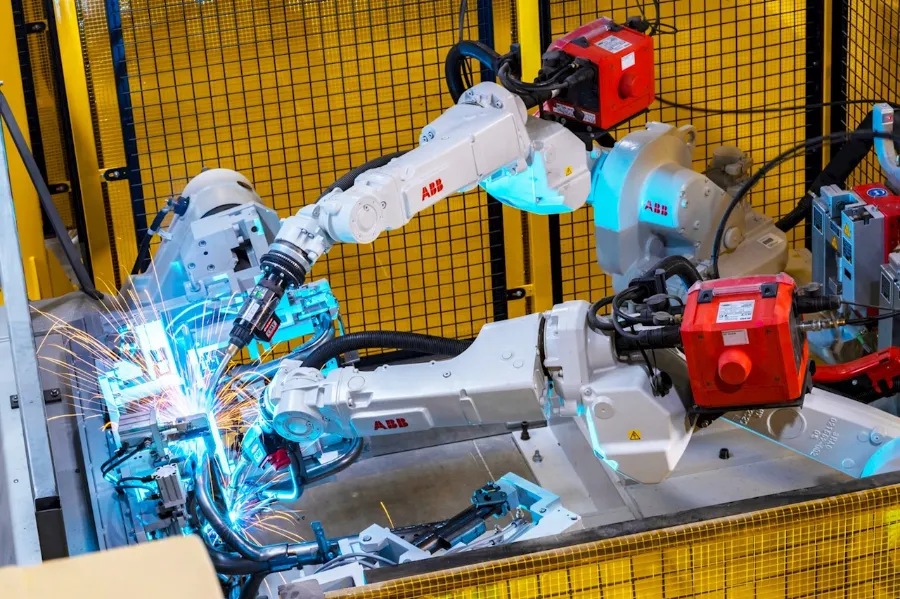
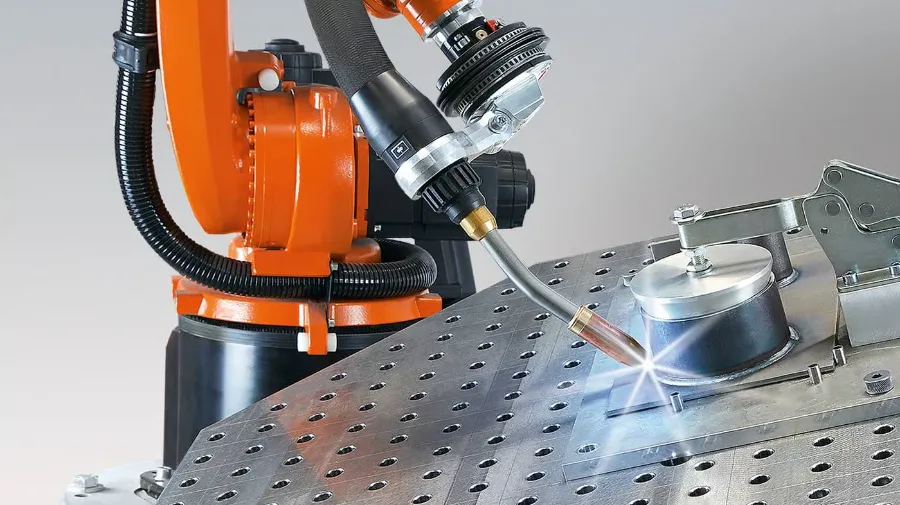
Mỏ Hàn, Súng Hàn (Welding Gun/Torch)
Mỏ hàn hoặc súng hàn là dụng cụ cuối cùng của cánh tay robot, chịu trách nhiệm truyền tải vật liệu hàn và tạo môi trường bảo vệ trực tiếp tại vị trí mối hàn.
1/ Đặc điểm cấu tạo
– Mỏ hàn có thể là loại thẳng hoặc cong và thường được gắn vào thân robot.
– Bao gồm các bộ phận chuyên biệt tùy theo loại hàn:
+ Đối với hàn MIG/TIG: Bao gồm bộ giữ điện cực (bulk) và bộ cấp dây (wire feeder).
+ Đối với hàn điểm (Spot Welding): Sử dụng các điện cực.
+ Đối với hàn Laser: Sử dụng Laser.

– Thiết bị ngoại vi: Mỏ hàn thường đi kèm với các thiết bị phụ trợ để duy trì hoạt động:
+ Trạm cắt dây để cắt tỉa dây hàn thừa.
+ Trạm làm sạch béc/đầu hàn (nozzle/tip cleaning station).
+ Trạm thay thế đầu hàn.
+ Lớp phủ và vỏ bọc để bảo vệ cáp, dụng cụ và các bộ phận khỏi tia lửa bắn tóe (spatter).
2/ Công dụng:
– Truyền dẫn: Truyền điện cực đến vị trí hàn.
– Bảo vệ: Tạo ra môi trường bảo vệ xung quanh mối hàn để tránh bị oxy hóa (thường thông qua việc cung cấp khí bảo vệ).
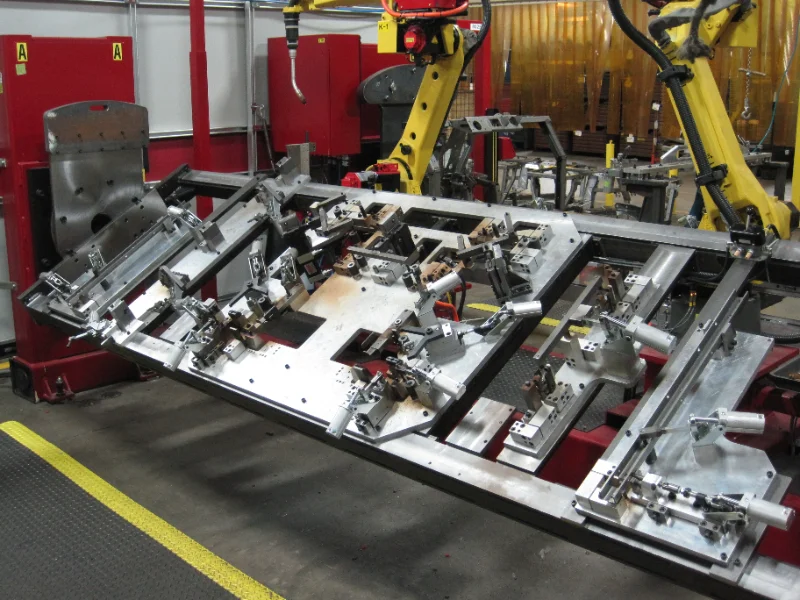
Bộ định vị phôi hàn
Đồ gá và bộ định vị là các thành phần cơ khí quan trọng trong cấu tạo robot hàn, có nhiệm vụ cố định và đặt phôi hàn ở vị trí tối ưu cho robot.
1/ Đặc điểm cấu tạo:
– Đồ gá (Fixture): Là cơ cấu được thiết kế để giữ cố định chi tiết/phôi hàn tại một vị trí xác định trong suốt quá trình robot làm việc.
– Bộ định vị (Positioner): Thường là các cơ cấu phức tạp hơn, có khả năng xoay hoặc nghiêng phôi hàn, được điều khiển bằng servo.
– Yêu cầu thiết kế:
+ Phải đảm bảo cường độ và sự chắc chắn để giữ vật hàn cố định trong quá trình hàn.
+ Phải đảm bảo tính linh hoạt và dễ vận hành, cho phép người vận hành thao tác nhanh chóng.
+ Đảm bảo mỏ hàn có thể tiếp cận tự do đến tất cả các mối hàn cần thiết.
2/ Công dụng:
– Giữ vật hàn ổn định, ngăn ngừa sự dịch chuyển do nhiệt hoặc lực tác động của robot, đảm bảo robot vận hành theo đúng lập trình.
– Đưa mối hàn về vị trí “hàn phẳng” giúp tăng tốc độ hàn và cải thiện chất lượng mối hàn.
– Đảm bảo điểm bắt đầu và kết thúc mối hàn luôn được đặt ở vị trí phù hợp.
– Thiết kế khung gá phù hợp giúp quá trình tháo lắp vật hàn diễn ra nhanh chóng.
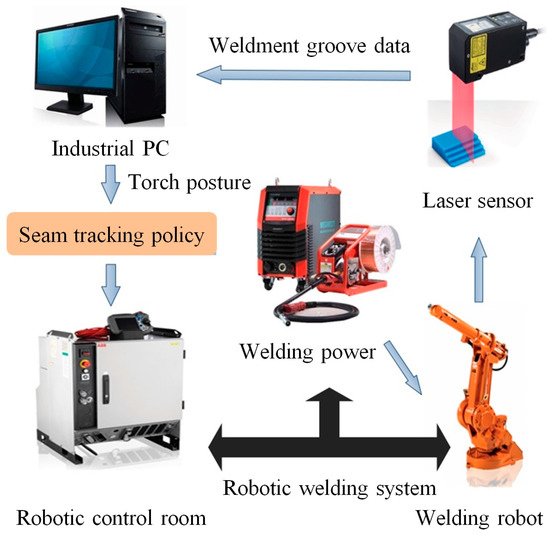
Cảm biến (Sensor)
Cảm biến là các thiết bị điện tử có vai trò thu thập dữ liệu, giám sát quá trình hàn và đảm bảo robot hoạt động an toàn, chính xác trong môi trường sản xuất.
1/ Đặc điểm cấu tạo: Hệ thống robot hàn sử dụng nhiều loại cảm biến khác nhau tùy theo mục đích:
– Cảm biến va chạm: Thường là bộ ly hợp hoặc cảm biến lực.
– Cảm biến dò đường hàn: Sử dụng công nghệ tiếp xúc hoặc laser/thị giác (vision).
– Cảm biến TCP: Cảm biến tiếp xúc hoặc laser dùng để hiệu chỉnh mỏ hàn.
– Camera/Cảm biến thị giác: Dùng để kiểm tra vị trí kẹp và vị trí chi tiết.

2/ Công dụng:
– Đảm bảo chất lượng mối hàn:
+ Dò đường hàn: Cảm biến dò đường hàn đảm bảo robot tìm thấy và điều chỉnh chính xác vị trí mối hàn trước khi bắt đầu, đặc biệt quan trọng khi phôi có độ sai lệch.
+ Hiệu chỉnh TCP: Cảm biến TCP đảm bảo việc đặt mối hàn được thực hiện đúng chỗ giúp duy trì độ chính xác cao của hệ thống.
– Bảo vệ thiết bị: Cảm biến va chạm giúp cánh tay robot tránh tiếp xúc với phôi hàn hoặc các thiết bị nguy hiểm, ngăn ngừa hư hỏng tốn kém.
– Giám sát quá trình: Camera và cảm biến được sử dụng để xác minh vị trí kẹp và vị trí của chi tiết/phôi hàn, đảm bảo mọi thứ đã sẵn sàng cho chu trình hàn.
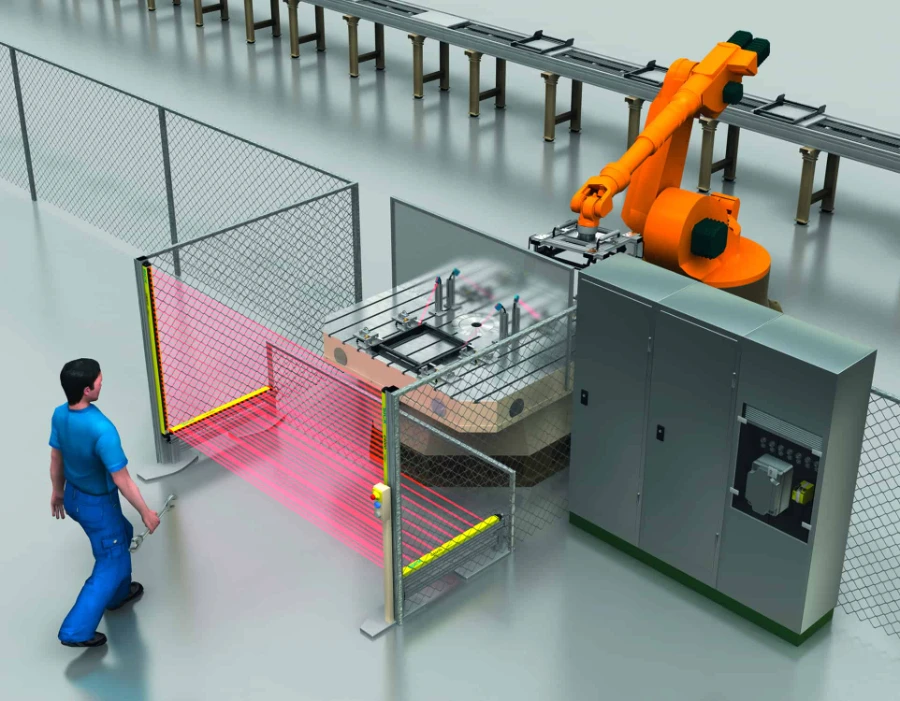
Công cụ an toàn (Safety Tools)
Các công cụ an toàn là hệ thống bảo vệ được tích hợp để ngăn ngừa tai nạn cho người vận hành, bảo vệ thiết bị và đảm bảo quá trình sản xuất không bị gián đoạn do sự cố.
1/ Đặc điểm cấu tạo:
– Thiết bị bảo vệ cơ bản: Thảm an toàn cảm biến áp suất, thiết bị bảo hộ cá nhân.
– Thiết bị khóa: Công tắc khóa liên động, khóa an toàn.
– Thiết bị giám sát: Các loại cảm biến an toàn, tia hồng ngoại, màn chắn an toàn và rèm chắn sáng.
2/ Công dụng:
– Ngăn ngừa hoạt động trái phép:
+ Công tắc khóa liên động có nhiệm vụ ngăn máy hoạt động hoặc bắt đầu chu trình mới trừ khi các cửa và rào chắn an toàn đã được đóng hoàn toàn.
+ Khóa an toàn ngăn việc mở hoặc tháo bỏ rào chắn bảo vệ.
– Bảo vệ người lao động khỏi hồ quang hàn và các mối nguy hiểm khác.
– Thảm an toàn cảm biến áp suất có thể dừng robot nếu phát hiện có người đứng trong khu vực nguy hiểm.
Bộ điều khiển điện tử
Bộ điều khiển điện tử là trung tâm thần kinh của hệ thống robot hàn, chịu trách nhiệm quản lý, điều hành và cho phép người vận hành tương tác với toàn bộ quá trình hàn.
1/ Đặc điểm cấu tạo:
– Bộ điều khiển: Là tủ chứa các mạch điện tử, CPU, driver và phần mềm điều khiển để xử lý các tín hiệu và chương trình vận hành của robot.
– Giao diện HMI: Có thể đơn giản (gồm các nút bấm, công tắc) hoặc phức tạp (là ứng dụng máy tính đa màn hình).
– Thiết bị lập trình cầm tay: Là một thiết bị cầm tay cho phép người vận hành tương tác trực tiếp, lập trình và lưu trữ chuyển động của robot.

2/ Công dụng:
– Điều hành hoạt động:
+ Kiểm soát toàn diện: Quản lý, điều khiển tất cả các khía cạnh của công việc: định vị bộ phận, giám sát cảm biến, xả bộ phận và vận chuyển đến trạm tiếp theo.
+ Xử lý chương trình: Chạy các chương trình đã lưu trữ, cho phép robot thực hiện các chu trình hàn lặp đi lặp lại.
– Lập trình vận hành:
+ Lập trình robot: Thiết bị lập trình cầm tay cho phép người vận hành dễ dàng lập trình các chuyển động của robot và lưu chúng thành một chương trình để chạy.
+ Theo dõi và Giám sát: HMI hiển thị thông tin về trạng thái máy, tham số hàn, và cho phép người vận hành điều chỉnh các thông số đó.
– Phân quyền truy cập: Xem xét cấp độ truy cập cho những người làm việc với thiết bị.
+ Ví dụ: tính năng nào dành cho người vận hành, tính năng nào giới hạn cho lập trình viên hoặc kỹ thuật viên bảo trì.
Hệ thống làm sạch đầu hàn
1/ Cấu tạo:
– Là một trạm ngoại vi, thường bao gồm dao cắt dây hàn thừa, chổi làm sạch và bình xịt chống bắn tóe.
2/ Công dụng:
– Tự động loại bỏ các hạt bắn tóe bám dính trên béc hàn và đầu hàn.
– Đồng thời cắt tỉa dây hàn về độ dài tối ưu.
=> Điều này giúp duy trì chất lượng hồ quang ổn định và kéo dài tuổi thọ của mỏ hàn.

Bộ cấp dây hàn tự động
1/ Cấu tạo:
– Thường là một hộp nhỏ gắn gần cánh tay robot hoặc tích hợp trong hệ thống.
– Chứa các con lăn cấp dây (drive rolls) và động cơ servo.
2/ Công dụng:
– Kiểm soát tốc độ cấp dây hàn từ cuộn dây đến mỏ hàn một cách chính xác và ổn định.
– Tốc độ cấp dây là một tham số hàn quan trọng, ảnh hưởng trực tiếp đến dòng hàn và hình dạng mối hàn.

Bộ định vị TCP
1/ Cấu tạo:
– Là một thiết bị đo lường chính xác (thường là một cảm biến tiếp xúc hoặc cảm biến laser) được đặt cố định trong vùng làm việc của robot.
2/ Công dụng:
– Hiệu chỉnh lại điểm trung tâm dụng cụ (TCP) của mỏ hàn một cách tự động sau mỗi lần va chạm nhẹ.
– Việc này đảm bảo robot luôn hàn chính xác theo quỹ đạo lập trình, ngay cả khi mỏ hàn bị dịch chuyển nhỏ.
Thiết bị chống va chạm
1/ Cấu tạo:
– Một khớp ly hợp cơ học hoặc cảm biến lực/mô-men xoắn được lắp giữa cánh tay robot và mỏ hàn.
2/ Công dụng:
– Nếu mỏ hàn va chạm mạnh với vật thể lạ hoặc phôi hàn, thiết bị này sẽ ngay lập tức kích hoạt công tắc dừng khẩn cấp.
=> Ngăn ngừa hư hỏng nghiêm trọng cho cánh tay robot và mỏ hàn.
Trên đây là cấu tạo Robot hàn tự động hoàn chỉnh, đảm bảo hoạt động hiệu quả, ổn định và an toàn trong môi trường sản xuất công nghiệp. Hệ thống robot hàn công nghiệp là một cỗ máy tự động hóa phức tạp và hoàn chỉnh, được xây dựng dựa trên sự phối hợp nhịp nhàng của 11 bộ phận cốt lõi.
Hãy liên hệ ngay tới VNTECH để được tư vấn chi tiết về giải pháp robot hàn tự động phù hợp nhất với sản phẩm của bạn.
VNTECH - Đơn vị cung cấp máy móc gia công cơ khí chính hãng, uy tín, đa dạng về chủng loại, đáp ứng mọi nhu cầu sản xuất. Để được tư vấn chi tiết và nhận báo giá tốt nhất, quý khách vui lòng liên hệ theo thông tin bên dưới.

________________
THÔNG TIN LIÊN HỆ
- Địa chỉ văn phòng:
- Địa chỉ Hà Nội: NO-05A23, Khu/Ngõ 1 Nguyễn Khắc Viện, Khu tái định cư Giang Biên, Hà Nội
- Chi Nhánh Đà Nẵng: Lô 11, Khu A4, Nguyễn Sinh Sắc, Hoà Minh, Liên Chiểu, Đà Nẵng
- Chi Nhánh HCM: 43 Đường N2, KP Thống Nhất, Dĩ An, Bình Dương
- SĐT: 0984.537.333
- Email: sale@vntechcnc.vn
- Facebook: https://www.facebook.com/vntechcnc
- Website: https://thietbivntech.vn