Trong thế giới sản xuất hiện đại, cánh tay robot là một mắt xích giúp nâng cao hiệu suất trong quy trình sản xuất công nghiệp. Tuy nhiên, để cánh tay robot thực sự phát huy hết năng lực, nó cần có một “bàn tay” phù hợp – đó chính là tay kẹp robot.

Việc lựa chọn đúng loại tay kẹp không chỉ ảnh hưởng đến hiệu suất, độ chính xác của robot mà còn tác động lớn đến an toàn và chi phí tổng thể của cả hệ thống.
Nội dung bài viết
Tay kẹp robot là gì?
Trong thế giới tự động hóa công nghiệp, tay kẹp robot (Robot Gripper) hay bộ phận cuối cánh tay robot đóng vai trò là giao diện trực tiếp để robot có thể tương tác với thế giới vật lý: gắp, giữ, di chuyển và thao tác với các vật thể trong môi trường sản xuất.
Chức năng của tay kẹp robot
Tay kẹp robot thực hiện nhiều chức năng thiết yếu, biến robot từ một cỗ máy di chuyển đơn thuần thành một công cụ đa năng:
1/ Gắp và giữ vật thể: Đây là chức năng cơ bản và quan trọng nhất.
– Tay kẹp được thiết kế để nắm chặt, giữ vật thể một cách an toàn trong suốt quá trình di chuyển hoặc thao tác.
Ví dụ: Tay kẹp cơ khí gắp một chi tiết máy, tay kẹp chân không hút một tấm kính, tay kẹp từ tính giữ một khối thép.
>>> Xem thêm: Cánh tay robot gắp hàng tự động
2/ Di chuyển vật thể: Sau khi gắp, tay kẹp cho phép robot di chuyển vật thể từ vị trí này sang vị trí khác.
– Chức năng này đòi hỏi tay kẹp phải giữ vật thể chắc chắn để tránh rơi rớt hoặc trượt trong quá trình di chuyển.
– Đặc biệt khi robot di chuyển nhanh hoặc thay đổi hướng đột ngột.
Ví dụ: Robot dùng tay kẹp để chuyển linh kiện từ băng tải sang máy gia công, hoặc xếp sản phẩm vào hộp.
3/ Định vị và thao tác vật thể: Tay kẹp không chỉ di chuyển mà còn giúp định vị vật thể vào đúng vị trí.
– Một số tay kẹp có thể xoay hoặc thay đổi góc độ của vật thể trong khi giữ, cho phép robot thực hiện các thao tác phức tạp hơn.
Ví dụ: Robot dùng tay kẹp định vị chính xác một con chip vào bo mạch, hoặc xoay một chi tiết để hàn ở nhiều mặt khác nhau.
4/ Kiểm soát và phản hồi: Nhiều tay kẹp hiện đại được tích hợp các cảm biến (cảm biến lực, cảm biến xúc giác, cảm biến khoảng cách, thị giác máy).
– Các cảm biến này cung cấp dữ liệu phản hồi về lực kẹp, sự hiện diện của vật thể, vị trí tương đối, hoặc thậm chí là các đặc tính của bề mặt vật thể.
– Thông tin phản hồi giúp robot điều chỉnh lực kẹp, xác nhận đã gắp thành công, hoặc đưa ra các quyết định dựa trên dữ liệu thời gian thực.
Ví dụ: Tay kẹp cảm nhận được lực quá lớn khi gắp một vật mềm và tự động giảm lực kẹp.

5/ Tích hợp công cụ: Robot sử dụng EOAT để cầm nắm và điều khiển các công cụ khác để thực hiện một tác vụ cụ thể.
Ví dụ:
– Hàn: Tay kẹp giữ mỏ hàn (MIG, TIG, Laser) và di chuyển nó dọc theo đường hàn.
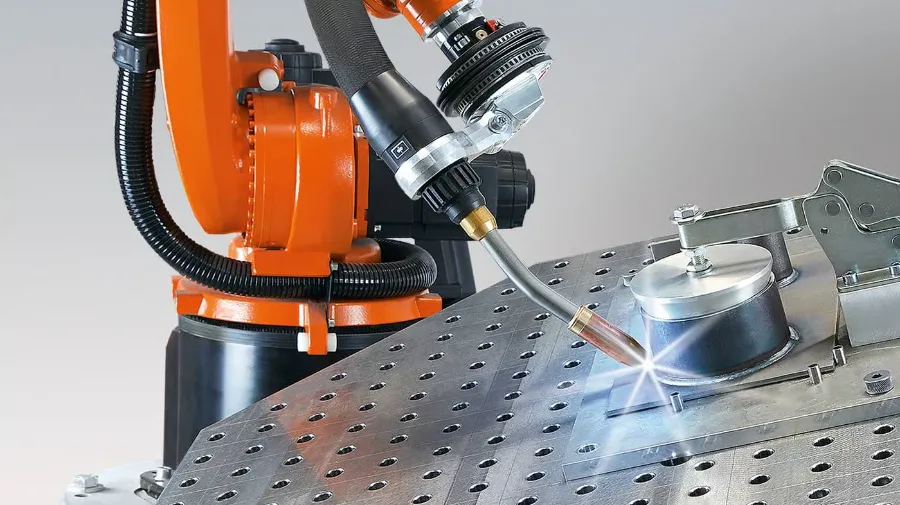
– Phun sơn/Keo dán: Tay kẹp giữ vòi phun và điều khiển đường phun.
– Gia công: Tay kẹp giữ dụng cụ mài, đánh bóng, hoặc khoan.
– Kiểm tra: Tay kẹp giữ camera hoặc đầu dò kiểm tra.
>>> Xem thêm: Báo giá robot hàn tự động trong công nghiệp
Lợi ích của tay kẹp Robot
Chức năng của tay kẹp robot không chỉ là một tính năng kỹ thuật mà còn có ý nghĩa lớn đối với hiệu quả sản xuất:
– Nâng cao năng suất: Giúp robot làm việc nhanh hơn, chính xác hơn, liên tục mà không cần nghỉ ngơi.
– Đảm bảo chất lượng sản phẩm: Giảm thiểu lỗi do sai sót trong quá trình gắp, định vị, và thao tác.
– Giảm thiểu chi phí: Giảm tỷ lệ phế phẩm, tiết kiệm vật liệu, và tối ưu hóa chi phí nhân công.
– Tăng tính linh hoạt của robot: Một cánh tay robot có thể thực hiện nhiều công việc khác nhau chỉ bằng cách thay đổi tay kẹp.
– Cải thiện an toàn lao động: Robot thay thế con người trong các công việc nguy hiểm, nặng nhọc hoặc lặp đi lặp lại.
Việc lựa chọn và tùy chỉnh tay kẹp robot phù hợp với từng chức năng cụ thể là yếu tố then chốt để khai thác tối đa tiềm năng của hệ thống robot trong môi trường sản xuất hiện đại.
>>> Xem các cánh tay robot tự động:
- Cánh tay robot 6 bậc tự do
- Cánh tay robot 5 bậc tự do
- Cánh tay robot 4 bậc tự do
- Cánh tay robot 3 bậc tự do
Các loại tay kẹp robot phổ biến
Thị trường tay kẹp robot vô cùng phong phú, mỗi loại hoạt động dựa trên một nguyên lý khác nhau và phù hợp với các ứng dụng riêng biệt.
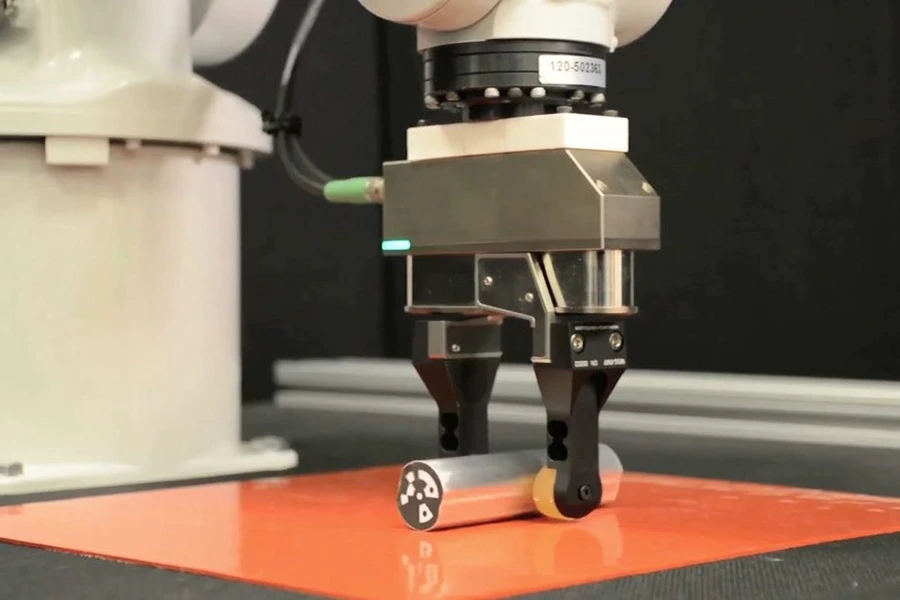
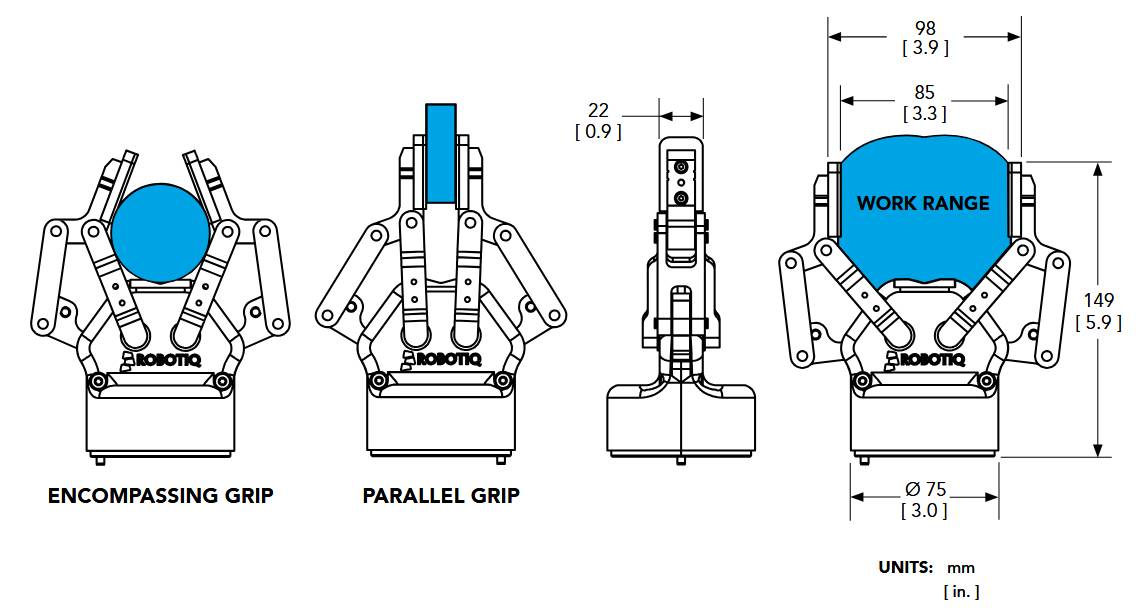
Tay kẹp cơ khí
Đây là loại tay kẹp robot phổ biến nhất, hoạt động tương tự như ngón tay con người, sử dụng lực kẹp vật lý. Cánh tay này sử dụng các hàm kẹp (hoặc ngón tay) được điều khiển bởi cơ cấu khí nén hoặc động cơ điện để nắm chặt vật thể bằng lực ma sát hoặc hình dáng.

– Ưu điểm: Đơn giản trong nguyên lý hoạt động, dễ điều khiển, tạo ra lực kẹp mạnh và đáng tin cậy, có độ bền cơ học cao.
– Nhược điểm: Kén hình dạng vật thể, không linh hoạt nếu cần gắp nhiều loại, có thể gây biến dạng vật thể mềm hoặc dễ vỡ.
Có 3 loại tay kẹp cơ khí:
1/ Tay kẹp 2 ngón (Two-Jaw Gripper): Hai ngón kẹp đối xứng nhau.
– Ưu điểm:
+ Đơn giản, cứng vững, chi phí thấp, tốc độ phản ứng nhanh.
+ Dễ dàng tùy chỉnh hàm kẹp cho các hình dạng cụ thể.
– Nhược điểm:
+ Giới hạn về hình dạng vật thể (phù hợp nhất với các vật có hai mặt phẳng song song hoặc hình trụ).
+ Không linh hoạt cho nhiều loại vật thể khác nhau nếu không thay đổi hàm kẹp.
+ Có thể gây biến dạng hoặc trầy xước vật thể mềm.
– Ứng dụng: Gắp/đặt chi tiết máy, linh kiện điện tử, bao bì hộp, chai lọ.

2/ Tay kẹp 3 ngón (Three-Jaw Gripper): Ba ngón kẹp chuyển động đồng tâm, bao quanh vật thể.
– Ưu điểm:
+ Giữ vật thể tròn hoặc trụ chắc chắn hơn tay kẹp 2 ngón, có khả năng định tâm vật thể tốt.
+ Phân bố lực kẹp đều hơn.
– Nhược điểm:
+ Phức tạp hơn về cơ khí, chi phí cao hơn.
+ Khó tùy biến cho vật thể không tròn.
– Ứng dụng:
+ Gắp/đặt các chi tiết trụ tròn như bánh răng, ống, vòng bi.
+ Thường dùng trong phục vụ máy CNC khi cần định tâm chính xác.
3/ Tay kẹp ngón tùy biến (Custom Finger Grippers): Hàm kẹp được thiết kế và chế tạo riêng biệt theo hình dạng chính xác của vật thể cần gắp.
– Ưu điểm: Giữ vật thể có hình dạng phức tạp rất chắc chắn và chính xác, đảm bảo không trượt hay biến dạng.
– Nhược điểm:
+ Không linh hoạt, chỉ dùng được cho một hoặc một vài loại vật thể cụ thể.
+ Chi phí thiết kế và chế tạo cao cho mỗi loại vật thể mới.
– Ứng dụng: Lắp ráp các chi tiết có hình dạng đặc biệt, xử lý các vật thể nhạy cảm cần độ chính xác cao.
>>> Xem thêm: Top 10 ứng dụng của cánh tay robot trong công nghiệp
Tay kẹp chân không (Vacuum Grippers)
Sử dụng một bơm chân không (hoặc bộ tạo chân không Venturi) để tạo ra áp suất thấp bên trong giác hút. Sự chênh lệch áp suất giữa bên trong giác hút và áp suất khí quyển bên ngoài sẽ tạo ra lực hút, giữ chặt vật thể.
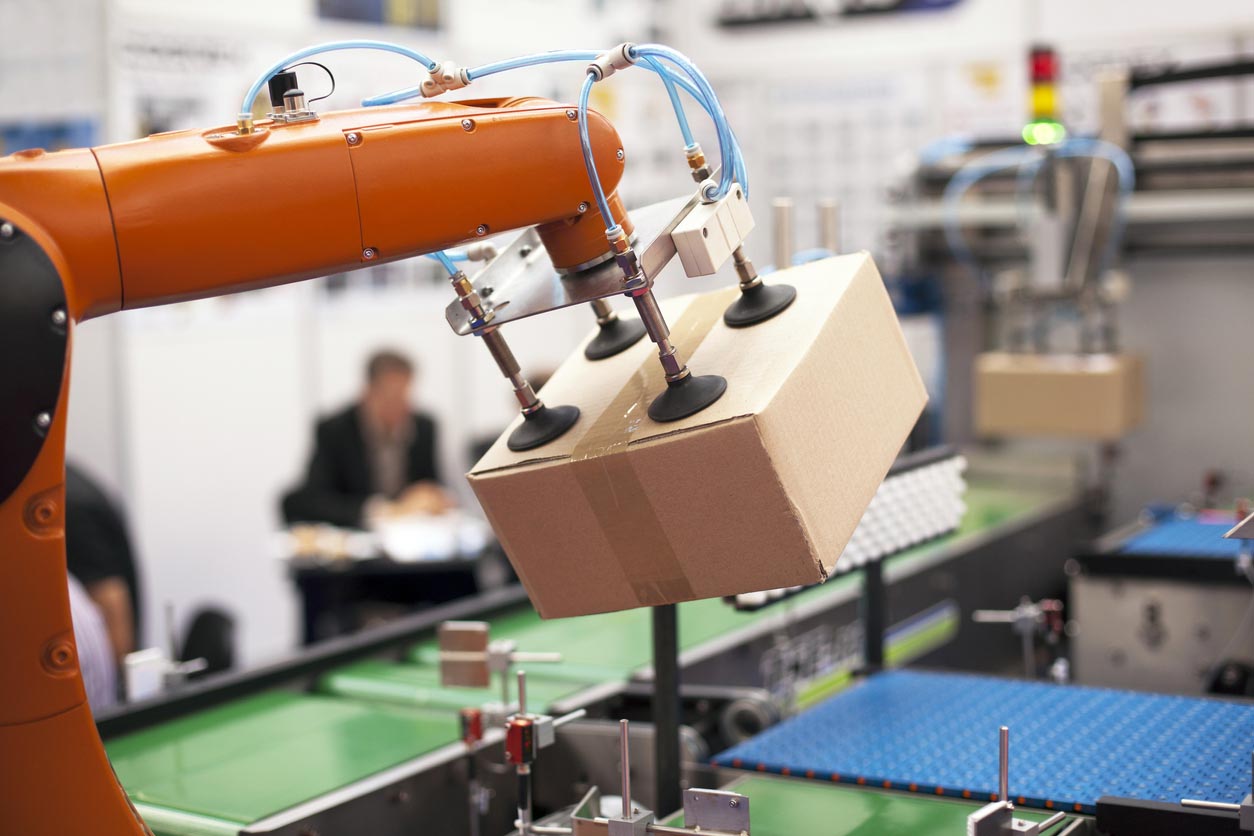
– Ưu điểm:
+ Gắp/đặt vật thể có bề mặt phẳng, nhẵn, không trọng lượng quá lớn: tấm kim loại, kính, giấy, bao bì.
+ Không gây biến dạng vật thể mềm, nhẹ.
+ Linh hoạt với các kích thước vật thể khác nhau.
+ Tốc độ gắp/thả nhanh.
– Nhược điểm:
+ Không hiệu quả với vật thể có bề mặt xốp, thô ráp, hoặc không kín khí.
+ Lực hút chân không có giới hạn, không phù hợp cho các vật quá nặng.
+ Hầu hết các bộ tạo chân không sử dụng khí nén, làm tăng chi phí vận hành.
+ Bụi bẩn hoặc mảnh vụn có thể làm tắc nghẽn giác hút hoặc bộ tạo chân không.
– Ứng dụng: Gắp/đặt tấm kim loại, kính, gạch men, giấy carton, bao bì, sản phẩm thực phẩm đóng gói, linh kiện điện tử có bề mặt phẳng.
Tay kẹp từ tính (Magnetic Grippers)
Sử dụng lực từ trường để hút và giữ chặt vật thể làm từ vật liệu từ tính (chủ yếu là sắt, thép và các hợp kim chứa sắt). Có 2 loại chính: nam châm vĩnh cửu (lực hút cố định, cần cơ cấu đẩy để nhả) và nam châm điện (có thể bật/tắt từ trường).
– Ưu điểm:
+ Gắp/đặt vật thể kim loại từ tính nhanh chóng.
+ Không gây biến dạng, trầy xước bề mặt vật thể.
+ Rất hữu ích khi vật thể nóng hoặc có bề mặt cần bảo vệ.
+ Có thể gắp nhiều vật thể nhỏ cùng lúc: Ví dụ như đinh, ốc vít, các chi tiết dập nhỏ.
+ Độ bền cao, ít bộ phận chuyển động: Giảm thiểu chi phí và thời gian bảo trì.
– Nhược điểm:
+ Chỉ dùng cho vật liệu từ tính: Không hiệu quả với nhôm, đồng, nhựa, gỗ, v.v.
+ Khó khăn khi nhả vật thể có từ dư.
+ Khoảng cách giữa nam châm và vật thể càng lớn, lực hút càng yếu.
+ Có thể gây nhiễu điện từ trong một số môi trường nhạy cảm.
– Ứng dụng: Xử lý tấm kim loại trong máy dập, máy cắt laser; gắp/đặt phôi thép trong máy CNC; sắp xếp các chi tiết kim loại nhỏ; bốc dỡ các bộ phận kim loại lớn.
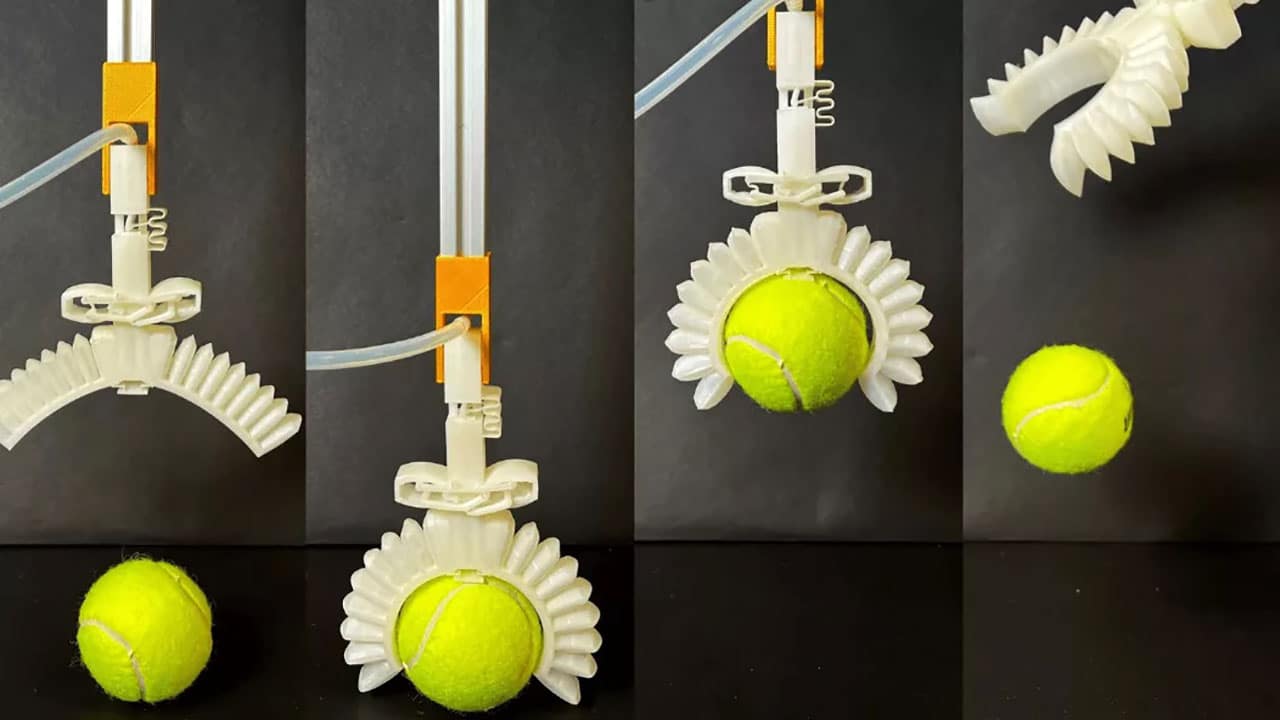
Tay kẹp bơm hơi/Khí nén
Sử dụng áp suất khí để làm biến dạng một túi khí (bladder) hoặc một ống khí/cao su. Túi khí này sẽ phồng lên và ôm lấy vật thể, tạo ra lực kẹp phân bố đều.

– Ưu điểm:
+ Gắp/đặt vật thể có hình dạng không đều, nhạy cảm, dễ vỡ.
+ Linh hoạt với nhiều kích thước và hình dạng vật thể.
+ Do không có các hàm kẹp cứng hoặc điểm tiếp xúc tập trung.
– Nhược điểm:
+ Không phù hợp cho các vật quá nặng.
+ Quá trình bơm/xả khí và biến dạng túi khí có thể tốn thời gian hơn các loại kẹp khác.
+ Do vật thể được ôm chứ không phải kẹp cứng, độ chính xác định vị có thể không cao bằng tay kẹp ngón.
+ Tuổi thọ của túi khí/cao su có thể bị ảnh hưởng bởi môi trường khắc nghiệt hoặc vật sắc nhọn.
– Ứng dụng: Xử lý thực phẩm mềm (trái cây, rau củ, bánh mì), chai lọ thủy tinh, các chi tiết nhựa phức tạp nhưng dễ vỡ, vật thể có hình dạng ngẫu nhiên (ví dụ: găng tay y tế).
Tay kẹp lực ma sát/Hút vật liệu rời
Đây là các loại tay kẹp tiên tiến, được thiết kế cho các tác vụ phức tạp nhất, như gắp các vật thể đổ đống.
– Nguyên lý:
+ Tay kẹp lực ma sát cao: Sử dụng các ngón tay mềm, có thể biến dạng để thích nghi với hình dạng của vật thể và tạo lực ma sát.
+ Tay kẹp vật liệu rời: Sử dụng một khối hạt vật liệu rời trong một túi khí. Khi túi khí được hút chân không, các hạt sẽ nén chặt lại và giữ vật thể. Khi giải phóng chân không, các hạt sẽ trở nên lỏng lẻo và nhả vật thể.
– Ưu điểm:
+ Gắp/đặt vật thể có hình dạng hoàn toàn không đều, ngẫu nhiên.
+ Thích nghi cao với sự đa dạng của vật thể.
+ Ít gây hư hại vật thể.
– Nhược điểm:
+ Tốc độ chậm.
+ Độ chính xác định vị không cao tuyệt đối.
+ Công nghệ phức tạp hơn, đòi hỏi hệ thống cảm biến và phần mềm điều khiển tiên tiến.
– Ứng dụng: Gắp/đặt các vật thể đổ đống, xử lý nông sản không đồng đều, gắp các sản phẩm may mặc.
Tay kẹp đặc biệt/Nâng cao
Ngoài các loại phổ biến trên, còn có những tay kẹp được thiết kế cho các ứng dụng rất đặc thù hoặc tích hợp công nghệ cao:
– Tay kẹp lực thích ứng: Sử dụng vật liệu mềm dẻo hoặc cấu trúc có thể biến dạng linh hoạt để ôm lấy và gắp nhiều loại vật thể khác nhau.
– Tay kẹp kim: Dùng các kim nhỏ để đâm xuyên và giữ vật thể. Thích hợp cho vật liệu mềm như vải, sợi carbon, bọt xốp.
– Tay kẹp nhiệt: Sử dụng nhiệt độ để làm nóng chảy nhẹ hoặc làm mềm bề mặt vật thể, tạo mối kẹp tạm thời, sau đó nguội để giữ chặt. Phù hợp cho vật liệu nhựa.
– Tay kẹp với cảm biến tích hợp: Nhiều tay kẹp hiện đại được tích hợp trực tiếp các cảm biến lực, cảm biến xúc giác, hoặc camera thị giác máy. Điều này giúp robot không chỉ gắp mà còn “cảm nhận” được vật thể, điều khiển lực kẹp thông minh hơn, phát hiện lỗi hoặc thực hiện các thao tác chính xác hơn.
Các yếu tố cần xem xét khi chọn tay kẹp Robot
Khi chọn tay kẹp robot các bạn cần xem xét những yếu tố sau:
1/ Đặc điểm của vật thể làm việc:
– Vật liệu: Loại vật liệu sẽ quyết định loại kẹp (cơ khí, chân không, từ tính, hoặc mềm) và cả vật liệu của hàm kẹp (cao su, kim loại, nhựa mềm).
– Kích thước: Nó nhỏ li ti hay cồng kềnh? Mỏng manh hay cứng rắn?
– Hình dạng: Vật thể tròn, vuông, phẳng, không đều, hay có hình thù phức tạp?
– Trọng lượng: Vật thể nặng bao nhiêu? Điều này ảnh hưởng đến khả năng chịu tải của tay kẹp, lực kẹp để giữ vật thể.
– Độ cứng/mềm: Vật thể dễ biến dạng, dễ vỡ, hay cứng rắn?
– Nhiệt độ: Nhiệt độ cực đoan yêu cầu vật liệu tay kẹp chuyên biệt hoặc hệ thống làm mát/sưởi ấm đi kèm.
– Đặc tính bề mặt: Bề mặt vật thể trơn trượt (dầu mỡ?), nhám, có lỗ xốp, hay dính? Điều này ảnh hưởng trực tiếp đến khả năng tạo ma sát hoặc chân không của tay kẹp.

2/ Môi trường làm việc: Môi trường xung quanh robot cũng đóng vai trò quan trọng trong việc lựa chọn tay kẹp phù hợp.
– Phòng sạch: Nếu hoạt động trong môi trường phòng sạch, tay kẹp phải không sinh bụi, không rò rỉ khí hoặc chất lỏng và có vật liệu chống tĩnh điện.
– Môi trường ẩm ướt, bụi bẩn, hóa chất: Yêu cầu tay kẹp có tiêu chuẩn bảo vệ chống bụi và nước (IP rating) cao, vật liệu chống ăn mòn.
– Nhiệt độ cao/thấp: Như đã đề cập ở vật thể, môi trường có nhiệt độ khắc nghiệt cũng đòi hỏi tay kẹp chịu được điều kiện đó.
– Yêu cầu về độ rung, tiếng ồn: Một số ứng dụng nhạy cảm với tiếng ồn hoặc rung động, yêu cầu tay kẹp hoạt động êm ái hơn.
3/ Yêu cầu của ứng dụng
– Lực kẹp: Cần lực mạnh để giữ chắc vật nặng, hay lực nhẹ nhàng để không làm nát vật thể mềm?
– Tốc độ: Tốc độ gắp và thả vật thể có phải là yếu tố then chốt để tăng năng suất không?
– Độ chính xác: Robot có cần định vị vật thể chính xác đến mức nào sau khi gắp?
– Khả năng tương thích: Tay kẹp có tương thích với giao diện cơ khí (mặt bích), giao diện điện (nguồn, tín hiệu) và phần mềm điều khiển của cánh tay robot hiện có không?
– Chi phí: Chi phí đầu tư ban đầu của tay kẹp, cũng như chi phí vận hành và chi phí bảo trì, thay thế phụ tùng.
– Tính linh hoạt: Robot có cần gắp nhiều loại vật thể khác nhau với hình dạng và kích thước đa dạng không?

Lưu ý khi chọn tay kẹp robot
– Không có tay kẹp nào là hoàn hảo cho mọi ứng dụng.
– Mỗi loại có điểm mạnh và điểm yếu riêng.
– Việc lựa chọn luôn là sự đánh đổi giữa các yếu tố như chi phí, độ chính xác, tốc độ và tính linh hoạt.
– Cần cân bằng giữa tính linh hoạt và chi phí.
+ Một tay kẹp đa năng sẽ linh hoạt hơn nhưng thường đi kèm với chi phí cao hơn.
+ Độ chính xác thấp hơn so với tay kẹp chuyên dụng.
– Xem xét hệ thống thay đổi nhanh:
+ Nếu bạn cần robot gắp nhiều loại vật thể khác nhau, một hệ thống tự động thay đổi tay kẹp sẽ tăng đáng kể tính linh hoạt và hiệu quả sản xuất.
– Tìm kiếm sự tư vấn chuyên nghiệp:
+ Đừng ngần ngại tìm kiếm sự tư vấn từ VNTECH, chúng tối sẽ giúp bạn đưa ra lựa chọn tối ưu nhất dựa trên nhu cầu cụ thể của bạn.
Tay kẹp robot không chỉ là một phụ kiện đi kèm mà là một phần không thể thiếu, là “bàn tay” thực sự của robot, trực tiếp quyết định khả năng hoàn thành tác vụ và hiệu suất của cả hệ thống tự động hóa. Với sự đa dạng về chủng loại và nguyên lý hoạt động, từ các tay kẹp cơ khí đơn giản đến các giải pháp thông minh phức tạp, thị trường hiện nay có thể đáp ứng hầu hết mọi nhu cầu công nghiệp.
Hãy liên hệ ngay tới VNTECH để được tư vấn chi tiết về giải pháp tự động phù hợp nhất với doanh nghiệp của bạn.
VNTECH - Đơn vị cung cấp máy móc gia công cơ khí chính hãng, uy tín, đa dạng về chủng loại, đáp ứng mọi nhu cầu sản xuất. Để được tư vấn chi tiết và nhận báo giá tốt nhất, quý khách vui lòng liên hệ theo thông tin bên dưới.

________________
THÔNG TIN LIÊN HỆ
- Địa chỉ văn phòng:
- Địa chỉ Hà Nội: NO-05A23 Khu TĐC Giang Biên, Ngõ 1 Nguyễn Khắc Viện, Phường Việt Hưng, Hà Nội
- Chi Nhánh Đà Nẵng: Lô 11, Khu A4, Nguyễn Sinh Sắc, Hoà Minh, Liên Chiểu, Đà Nẵng
- Chi Nhánh HCM: 43 Đường N2, KP Thống Nhất, Dĩ An, Bình Dương
- SĐT: 0984.537.333
- Email: sale@vntechcnc.vn
- Facebook: https://www.facebook.com/vntechcnc
- Website: https://thietbivntech.vn
- Máy dập cơ là gì? Nguyên lý, ứng dụng và các loại máy dập cơ
- Những Lỗi Khi Gia Công Cắt Laser Inox: Nguyên nhân & Cách khắc phục
- Dây Chuyền Hàn Tự Động: Từ Lắp Ráp Đến Sản Xuất Kết Cấu Thép
- Máy Hàn Laser 500W: Lựa Chọn Tối Ưu Cho Doanh Nghiệp
- Giải pháp cấp phôi tự động: Tối ưu hóa hiệu suất cho Máy tiện và Máy phay CNC