Cánh tay robot đang trở thành giải pháp tự động hóa toàn cầu, mở ra một kỷ nguyên mới cho ngành cơ khí chế tạo và kết cấu thép hiện đại. Được thiết kế dựa trên cấu trúc sinh học và các bậc tự do linh hoạt tương tự như tay người, cánh tay máy này sở hữu khả năng vận hành bền bỉ với độ chính xác lặp lại hoàn hảo đến từng milimet.
Hiện nay, có rất nhiều doanh nghiệp đã tích hợp cánh tay robot vào dây chuyền sản xuất để giải phóng sức lao động, chuẩn hóa chất lượng sản phẩm, tối ưu hóa chu kỳ sản xuất và nâng cao năng lực cạnh tranh vượt trội trên thị trường.
Bài viết này, VNTECH sẽ cung cấp một cái nhìn tổng thể về cánh tay robot từ cấu tạo, nguyên lý, lợi ích đến những ứng dụng rộng rãi trong công nghiệp.
Nội dung bài viết
- 1 Cánh tay robot là gì?
- 2 Lợi ích của cánh tay robot trong công nghiệp
- 3 Cấu tạo cánh tay máy robot
- 4 Nguyên lý hoạt động của cánh tay robot
- 5 Các loại cánh tay Robot phổ biến
- 6 Phân loại cánh tay robot
- 7 Ứng dụng của cánh tay Robot
- 8 Câu hỏi liên quan về cánh tay robot
- 8.1 Số trục (bậc) của cánh tay robot có ý nghĩa gì?
- 8.2 Cánh tay robot làm được những công việc gì?
- 8.3 Sử dụng cánh tay robot có khó không? Có phải biết lập trình không?
- 8.4 Độ chính xác của cánh tay robot cao đến mức nào?
- 8.5 Doanh nghiệp nhận được lợi ích gì khi đầu tư cánh tay robot?
- 8.6 Tuổi thọ của cánh tay robot là bao lâu?
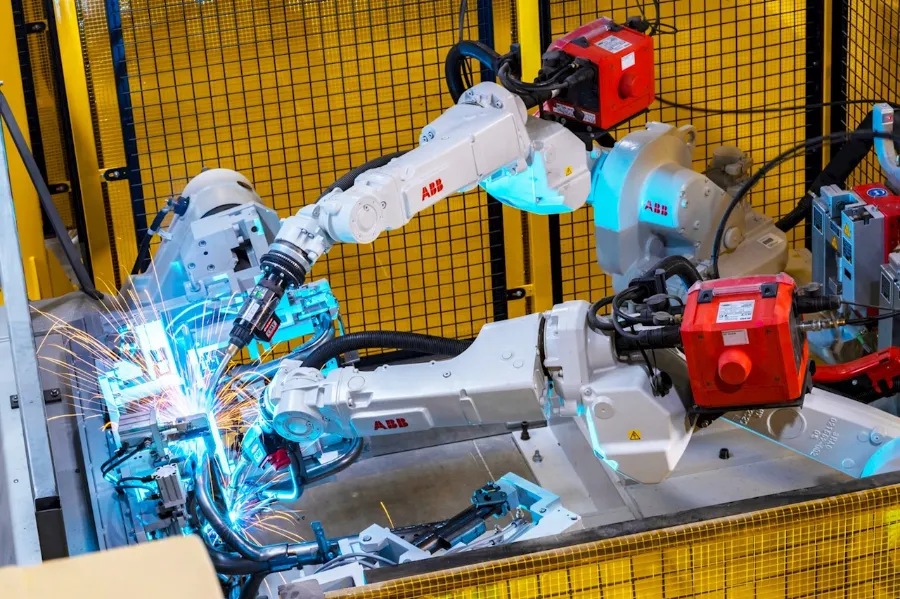
Cánh tay robot là gì?
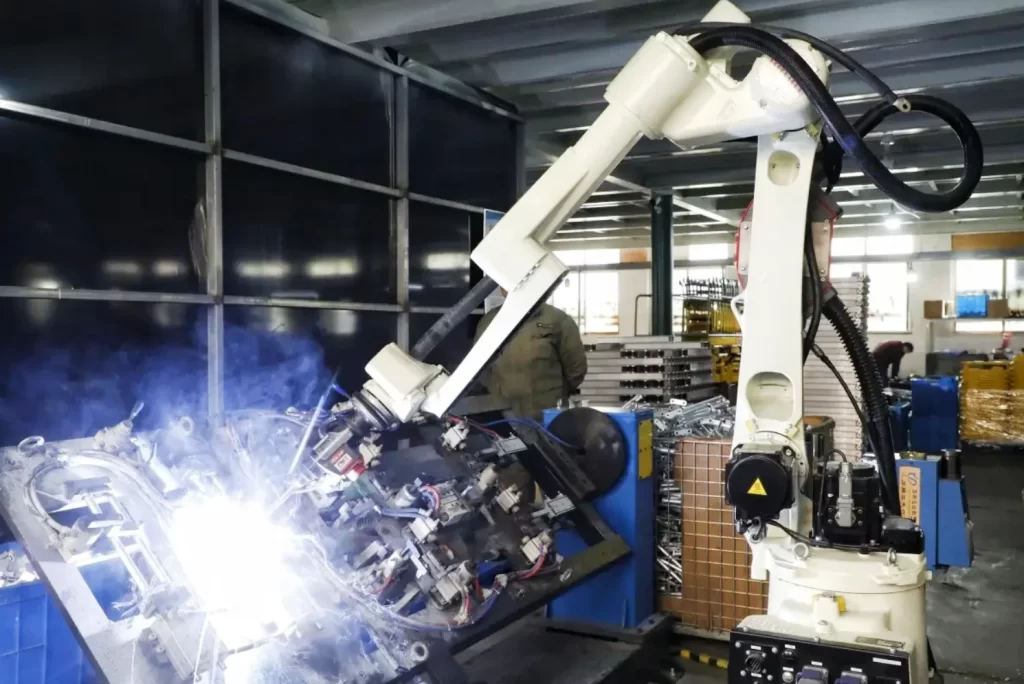
Cánh tay robot (Robot arm) là thiết bị cơ khí đa chức năng, được thiết kế để di chuyển vật liệu (Robot gắp hàng) hay hàn vật liệu (Robot hàn) thông qua các chuyển động đã được lập trình sẵn. Cánh tay máy robot là một cấu trúc động học dạng chuỗi gồm một loạt các khớp nối, liên kết được điều khiển bởi các bộ truyền động và quản lý bởi một hệ thống điều khiển tinh vi.
Điểm đặc trưng của cánh tay robot là số bậc tự do (số khớp độc lập) có thể điều khiển. Cánh tay robot 6 bậc là cánh tay máy phổ biến nhất trong công nghiệp, có khả năng định vị và định hướng một vật thể tự do trong không gian 3 chiều (X, Y, Z cho vị trí và Roll, Pitch, Yaw cho định hướng).
Lợi ích của cánh tay robot trong công nghiệp
Lợi ích của cánh tay robot trong công nghiệp là rất đa dạng, dưới đây là những lợi ích chính:
- Tăng năng suất gấp nhiều lần
- Tay Robot có thể làm việc 24/7 mà không cần nghỉ ngơi => tăng đáng kể sản lượng.
- Robot cánh tay có tốc độ vượt trội so với con người, đặc biệt trong các công việc lặp lại.
- Rút ngắn thời gian hoàn thành mỗi sản phẩm, từ đó tăng tổng sản lượng.

- Độ chính xác gần như tuyệt đối:
- Tay máy Robot sở hữu độ chính xác và tính lặp lại cực cao.
- Sản phẩm được sản xuất đồng đều, ít lỗi, giúp giảm chi phí vật liệu và chi phí làm lại.
- Ứng dụng rất nhiều trong các ngành yêu cầu dung sai cực nhỏ: điện tử, hàng không vũ trụ,…
- Đảm bảo an toàn lao động:
- Thay thế con người trong môi trường nguy hiểm: môi trường độc hại (hóa chất, bụi bẩn), nhiệt độ cao, tiếng ồn lớn,…
- Hoặc các công việc tiềm ẩn rủi ro: nâng vật nặng, hàn, cắt, xử lý vật sắc nhọn.
- Loại bỏ các công việc đơn điệu, lặp lại gây căng thẳng cơ bắp, chấn thương cho công nhân.
- Tối ưu chi phí vận hành dài hạn:
- Tay máy Robot giúp tiết kiệm đáng kể chi phí lương, phúc lợi, tuyển dụng và đào tạo nhân sự.
- Độ chính xác của cánh tay robot giúp giảm lãng phí vật liệu trong các quy trình như sơn, dán keo, cắt.
- Các tay robot của VNTECH được tối ưu để tiết kiệm năng lượng.
- Khả năng thích ứng ấn tượng:
- Dễ dàng lập trình lại để thực hiện các nhiệm vụ khác nhau.
- Dễ dàng thay đổi sản phẩm hoặc quy trình sản xuất.
- Một cánh tay robot có thể được sử dụng cho nhiều tác vụ khác nhau.
- Phù hợp cho cả sản xuất hàng loạt lớn và sản xuất theo lô nhỏ, tùy chỉnh.
- Tăng cường khả năng cạnh tranh:
- Doanh nghiệp có thể đáp ứng nhu cầu thị trường nhanh hơn, sản xuất ra sản phẩm chất lượng cao hơn.
- Tạo lợi thế cạnh tranh, giúp doanh nghiệp dẫn đầu trong ngành, thu hút khách hàng và đối tác.
- Khuyến khích doanh nghiệp đầu tư vào R&D và các công nghệ tiên tiến khác.
>>> Xem thêm: Các loại cánh tay robot công nghiệp phổ biến

Cánh tay robot không chỉ là một công cụ tự động hóa mà còn là một khoản đầu tư chiến lược giúp doanh nghiệp tối ưu hóa hoạt động, nâng cao chất lượng và đảm bảo sự phát triển bền vững trong môi trường kinh doanh hiện đại.
Cấu tạo cánh tay máy robot
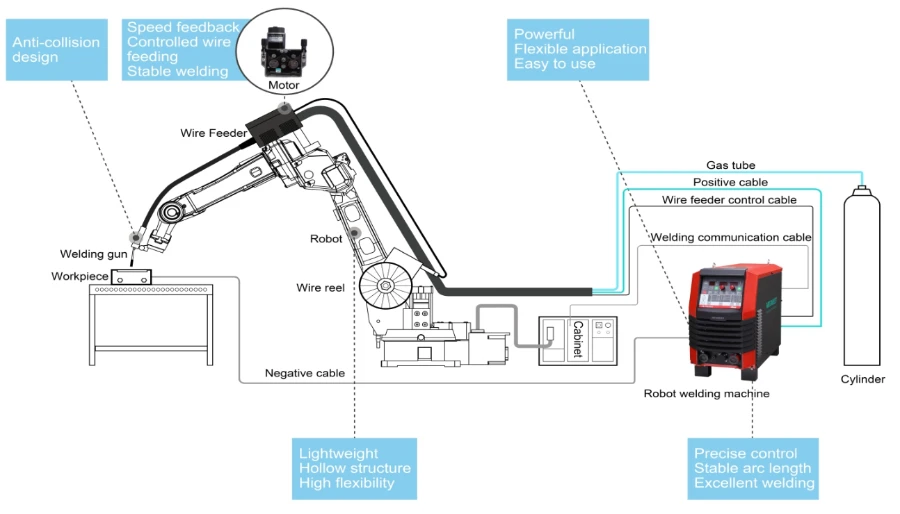
Cánh tay robot là một hệ thống cơ khí phức tạp, bao gồm nhiều thành phần phối hợp nhịp nhàng với nhau để thực hiện các tác vụ một cách chính xác và hiệu quả. Các thành phần chính cấu tạo nên cánh tay máy robot:
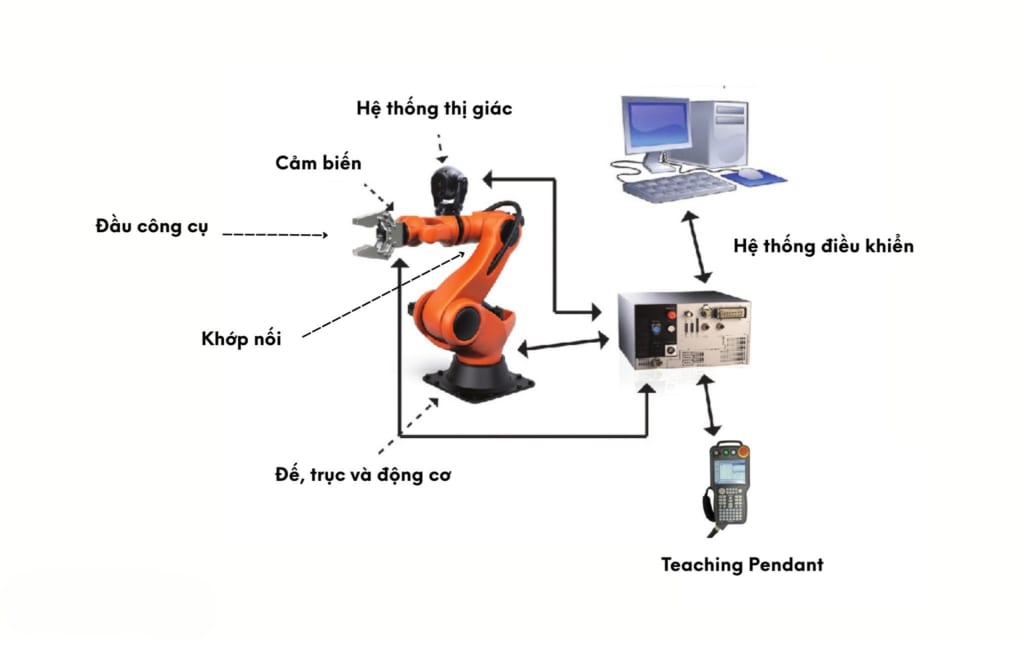
Cơ cấu cơ khí tay robot
Đây là bộ khung xương của cánh tay robot, quyết định hình dạng và khả năng di chuyển của nó.
- Các khớp nối: Là các điểm nối cho phép các bộ phận của cánh tay robot di chuyển.
- Có 2 loại khớp chính:
- Khớp quay (Revolute/Rotary Joint – R): Cho phép các bộ phận quay quanh một trục, giống như khớp vai hoặc khớp khuỷu tay của con người.
- Khớp tịnh tiến (Prismatic/Linear Joint – P): Cho phép các bộ phận di chuyển theo một đường thẳng, như một piston.
*Một cánh tay robot tiêu chuẩn thường có 6 bậc tự do, cho phép nó di chuyển và định hướng trong không gian 3 chiều một cách linh hoạt.
- Các liên kết: Là các đoạn cứng nối giữa các khớp.
- Các liên kết này, cùng với các khớp, tạo nên chuỗi động học của robot, xác định tầm vươn và hình dạng tổng thể của nó.
- Vùng làm việc: Là không gian vật lý mà bộ phận cuối của robot có thể vươn tới.
- Kích thước và hình dạng của vùng làm việc phụ thuộc vào số lượng khớp, độ dài các liên kết và giới hạn chuyển động của từng khớp.

Bộ truyền động tay máy
Đây là bộ phận chịu trách nhiệm tạo ra chuyển động tại mỗi khớp.
- Động cơ điện: Động cơ servo cung cấp khả năng điều khiển vị trí, tốc độ và mô-men xoắn cực kỳ chính xác.
- Hệ thống khí nén: Sử dụng khí nén để tạo ra chuyển động.
- Thường dùng cho các ứng dụng đơn giản, yêu cầu lực lớn nhưng không cần độ chính xác vị trí quá cao.
- Hệ thống thủy lực: Sử dụng chất lỏng dưới áp suất cao để tạo ra lực.
- Hệ thống thủy lực thường được dùng cho các robot tải trọng cực lớn, cần lực mạnh và khả năng chịu tải cao.

Bộ điều khiển cánh tay
Bộ điều khiển là bộ phận chịu trách nhiệm xử lý thông tin và ra lệnh cho các bộ truyền động.
- Chức năng chính: Điều khiển chính xác vị trí, tốc độ, gia tốc của từng khớp.
- Quản lý giao tiếp với các thiết bị ngoại vi khác: cảm biến, PLC, hệ thống sản xuất.
- Phần cứng: Bộ vi xử lý (CPU) mạnh mẽ, bộ nhớ để lưu trữ dữ liệu, giao diện vào/ra (I/O) để kết nối với các cảm biến và thiết bị bên ngoài.
- Phần mềm: Chạy trên bộ điều khiển, bao gồm hệ điều hành robot và các phần mềm lập trình chuyên dụng cho phép người dùng tạo và chỉnh sửa các tác vụ cho robot.
Bộ phận cuối cánh tay robot
Đây là bàn tay của tay máy robot – bộ phận tương tác trực tiếp với vật thể hoặc môi trường làm việc.
- Kẹp/Tay gắp (Grippers): Sử dụng ngón kẹp để giữ vật thể, hoặc lực hút chân không, hoặc nam châm.
- Dụng cụ chuyên dụng: Ngoài kẹp, cánh tay robot có thể được trang bị súng hàn, vòi phun sơn, công cụ mài/đánh bóng, mũi khoan, camera kiểm tra,…
>>> Xem thêm: Bọc tách cấu tạo robot hàn từng phần
Cảm biến cánh tay máy
Cảm biến cung cấp thông tin phản hồi cho bộ điều khiển, giúp cánh tay robot nhận biết môi trường xung quanh và thực hiện các tác vụ thông minh hơn.
- Cảm biến vị trí: Đo chính xác góc quay hoặc vị trí tịnh tiến của từng khớp.
- Cảm biến lực/mô-men xoắn: Cảm nhận lực tác động cho các ứng dụng cần tương tác lực chính xác hoặc cho robot cộng tác.
- Cảm biến thị giác: Cho phép robot hiểu môi trường để nhận dạng, định vị hoặc kiểm tra chất lượng.
- Các cảm biến khác: Tiệm cận, va chạm, nhiệt độ…

Nguyên lý hoạt động của cánh tay robot
Nguyên lý hoạt động của cánh tay robot dựa trên sự phối hợp chặt chẽ giữa phần cứng cơ khí, hệ thống điện tử và phần mềm điều khiển. Về cơ bản, nó tuân theo một chu trình nhận lệnh, xử lý thông tin và tạo ra chuyển động chính xác.
- Lập trình: Để cánh tay robot thực hiện một nhiệm vụ cụ thể, nó cần được lập trình trước.
- Lập trình Point-to-Point: Người vận hành xác định các điểm trong không gian mà robot cần di chuyển qua.
- Robot sẽ di chuyển từ điểm này đến điểm khác theo trình tự đã định.
- Lập trình đường liên tục: Robot được lập trình để di chuyển theo một quỹ đạo liên tục, mượt mà (sơn, hàn hồ quang).
- Lập trình ngoại tuyến: Được tạo trên máy tính bằng phần mềm mô phỏng 3D, sau đó tải xuống robot thực tế.
- Lập trình hướng dẫn: Người vận hành trực tiếp di chuyển cánh tay robot đến các vị trí mong muốn và robot sẽ ghi nhớ quỹ đạo đó.
- Nhận lệnh: Sau khi được lập trình, bộ điều khiển của robot sẽ nhận các lệnh từ chương trình đã được tải lên (PLC, hệ thống MES).
- Xử lý và chuyển đổi tọa độ
- Các lệnh thường được đưa ra dưới dạng tọa độ Cartesian của bộ phận cuối cánh tay robot trong không gian làm việc.
- X, Y, Z cho vị trí.
- Rx, Ry, Rz cho định hướng.
- Động học ngược:
- Bộ điều khiển sẽ sử dụng các thuật toán động học ngược để chuyển đổi tọa độ Cartesian thành các giá trị góc hoặc vị trí tịnh tiến cụ thể cho từng khớp của robot.
- Mỗi khớp phải đạt được một giá trị nhất định để đưa bộ phận cuối đến đúng vị trí và hướng yêu cầu.

- Điều khiển chuyển động
- Dựa trên các giá trị đã tính toán từ động học ngược, bộ điều khiển sẽ gửi tín hiệu điều khiển đến các bộ truyền động tại mỗi khớp.
- Các cảm biến vị trí gắn tại mỗi khớp sẽ liên tục đo lường vị trí thực tế của khớp và gửi dữ liệu phản hồi về bộ điều khiển.
- Bộ điều khiển so sánh vị trí thực tế của từng khớp với vị trí mong muốn.
- Nếu có sai lệch, nó sẽ điều chỉnh tín hiệu điều khiển để hiệu chỉnh chuyển động, đảm bảo rằng mỗi khớp di chuyển đến đúng vị trí yêu cầu một cách chính xác.
- Quá trình diễn ra liên tục và rất nhanh giúp robot đạt được độ chính xác, tính lặp lại cao.
- Ngoài vị trí, bộ điều khiển còn kiểm soát tốc độ và gia tốc của chuyển động để đảm bảo robot di chuyển mượt mà, tránh rung lắc, va chạm.
- Thực hiện tác vụ
- Khi các khớp đã di chuyển đến đúng vị trí, bộ phận cuối cánh tay robot sẽ thực hiện tác vụ được giao (kẹp vật, hàn, phun sơn, lắp ráp).
- Trong nhiều ứng dụng, robot còn tương tác với các cảm biến khác như:
- Cảm biến thị giác: để nhận dạng và định vị vật thể.
- Cảm biến lực: để điều chỉnh lực kẹp hoặc lực tương tác.
- Cảm biến an toàn: để phát hiện chướng ngại vật và dừng khẩn cấp.
Nguyên lý hoạt động của cánh tay robot là một chu trình liên tục của việc nhận lệnh, tính toán động học, điều khiển chính xác các bộ truyền động dựa trên phản hồi từ cảm biến và thực hiện tác vụ một cách tự động, hiệu quả.
Các loại cánh tay Robot phổ biến
Trên thị trường hiện nay có rất nhiều loại cánh tay robot. Mỗi loại có ưu và nhược điểm riêng, phù hợp với các ứng dụng khác nhau.
Cánh tay Robot khớp nối
Articulated Robot là tay máy robot phổ biến nhất, có cấu tạo giống cánh tay người với các khớp quay. Robot khớp nối thường có từ 4 đến 6 trục (bậc tự do). Các khớp cho phép cánh tay robot có phạm vi chuyển động rộng và linh hoạt cao.
– Ưu điểm:
+ Khả năng tiếp cận không gian phức tạp và thực hiện nhiều nhiệm vụ khác nhau.
+ Có thể vươn tới các điểm xa và sâu.
+ Phù hợp với nhiều ứng dụng.
– Ứng dụng: Hàn, sơn, lắp ráp phức tạp, gia công vật liệu, xử lý vật liệu, đóng gói, xếp dỡ pallet.
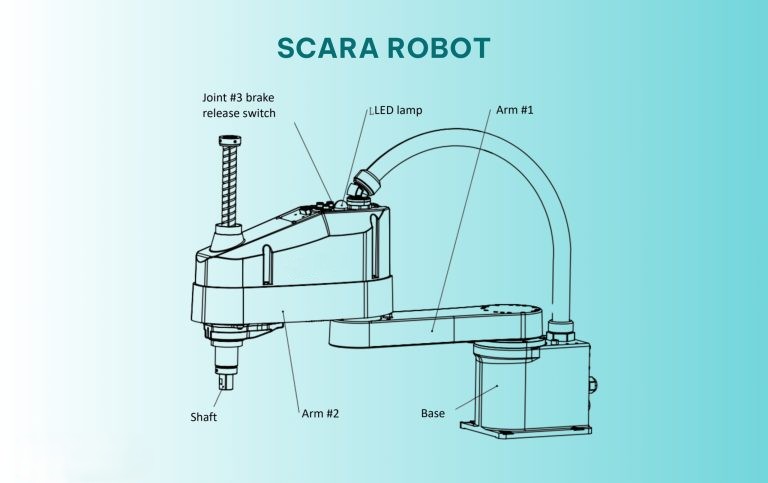
Cánh tay máy SCARA
Cánh tay robot SCARA (Selective Compliance Assembly Robot Arm) – Loại robot có 4 trục, trong đó 3 trục đầu tiên là khớp quay và trục cuối cùng là khớp tịnh tiến theo chiều dọc (trục Z). Các khớp quay thường nằm trên cùng một mặt phẳng ngang.
– Ưu điểm:
+ Tốc độ cao, rất nhanh trong các chuyển động ngang.
+ Độ chính xác cao, đặc biệt chính xác trong mặt phẳng XY và trong các tác vụ lắp ráp theo chiều dọc.
+ Kích thước nhỏ gọn, tiết kiệm không gian.
– Ứng dụng: Lắp ráp linh kiện điện tử nhỏ, gắp và đặt tốc độ cao, đóng gói, dán nhãn, kiểm tra sản phẩm.
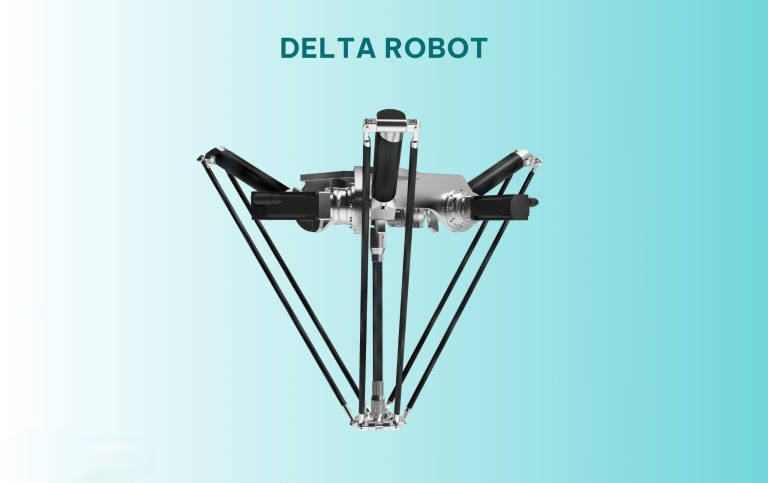
Cánh tay Robot Delta
Cánh tay Robot Delta có cấu trúc song song, thường bao gồm 3 hoặc 4 cánh tay nhẹ kết nối từ một đế cố định đến một bệ di chuyển ở trung tâm. Nhờ cấu trúc này, tất cả các bộ truyền động đều được đặt ở phần đế, giảm thiểu quán tính.
– Ưu điểm:
+ Đạt được gia tốc và tốc độ di chuyển vượt trội.
+ Độ chính xác và lặp lại cao phù hợp cho các nhiệm vụ đòi hỏi sự tỉ mỉ.
+ Tải trọng nhẹ, thường được thiết kế cho các vật phẩm nhỏ.
– Ứng dụng: Gắp và đặt sản phẩm nhẹ (ngành thực phẩm, dược phẩm), phân loại, đóng gói tốc độ cao.
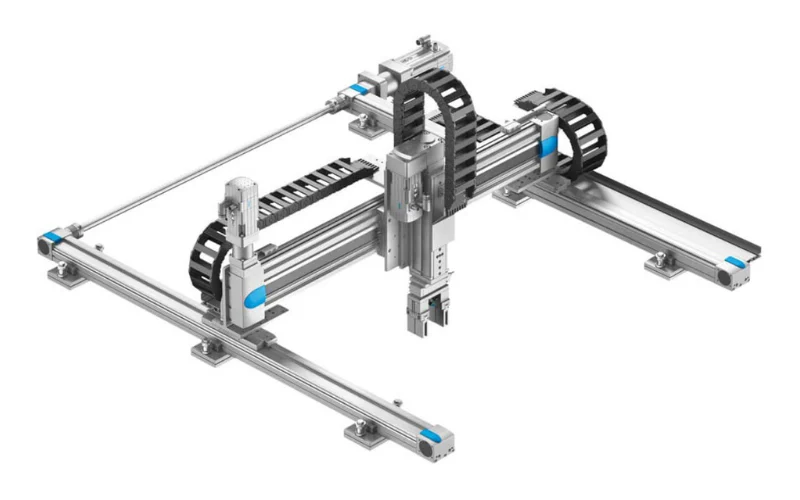
Cánh tay Robot Cartesian
Cánh tay Robot Cartesian di chuyển dọc theo các trục thẳng (X, Y, Z) vuông góc với nhau, tạo ra một vùng làm việc hình hộp chữ nhật. Chúng thường được lắp đặt trên một khung giàn (gantry).
– Ưu điểm:
+ Độ chính xác cao: Rất chính xác trong các chuyển động thẳng.
+ Tải trọng lớn: Có khả năng xử lý vật nặng.
+ Vùng làm việc lớn: Thích hợp cho các ứng dụng cần di chuyển trên diện rộng.
+ Lập trình đơn giản: Dễ lập trình với các chuyển động tuyến tính.
– Ứng dụng: Gia công CNC, in 3D quy mô lớn, xếp dỡ pallet, lắp ráp các bộ phận lớn, cắt laser.
Robot Cộng Tác (Cobot)
Robot cộng tác (Cobot) không phải là một loại cấu hình cơ khí riêng biệt mà là một phân loại dựa trên khả năng làm việc. Cobot thường có cấu hình khớp nối, nhưng được thiết kế đặc biệt để có thể làm việc an toàn cùng con người trong cùng một không gian mà không cần hàng rào bảo vệ.
– Ưu điểm:
+ An toàn khi tương tác: Cho phép người và robot làm việc gần nhau.
+ Dễ lập trình, có giao diện trực quan và tính năng “lập trình bằng tay”.
+ Linh hoạt cao, dễ dàng triển khai và tái cấu hình cho các nhiệm vụ khác nhau.
– Ứng dụng: Hỗ trợ lắp ráp, kiểm tra chất lượng, bắt vít, tra keo, gắp đặt nhẹ, đóng gói và các công việc lặp lại mà công nhân không muốn thực hiện.

Ngoài ra còn có các loại robot ít phổ biến hơn như: Robot Hình trụ (Cylindrical Robot) và Robot Hình cầu (Spherical/Polar Robot),… chủ yếu khác nhau ở cách sắp xếp các khớp tạo ra vùng làm việc có hình dạng tương ứng.
Phân loại cánh tay robot
Ngoài những loại cánh tay robot trên, cánh tay máy còn được phân loại theo những tiêu chí sau:
Phân loại theo ứng dụng
1/ Robot Hàn: Thiết kế đặc biệt cho hàn hồ quang hoặc hàn điểm.

2/ Robot Sơn: Chuyên dùng cho các quy trình phun sơn.
3/ Robot Lắp ráp: Thường là SCARA hoặc robot khớp nối nhỏ/trung bình dùng cho lắp ráp linh kiện.
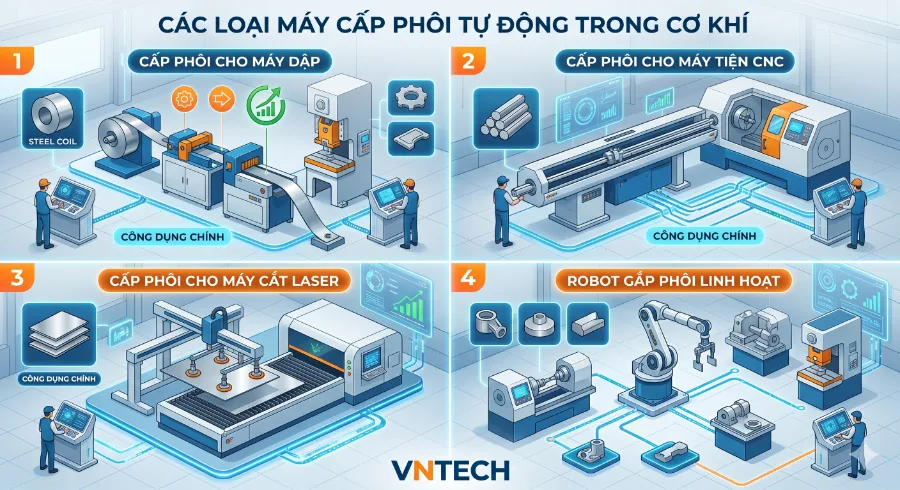
4/ Robot Gắp & Đặt: Tối ưu cho việc di chuyển vật phẩm từ vị trí này sang vị trí khác (thường là Delta, SCARA, hoặc khớp nối nhỏ).
5/ Robot Xếp dỡ Pallet: Có tầm với và tải trọng lớn để xếp hoặc dỡ hàng hóa lên pallet.
6/ Robot Gia công: Được trang bị cảm biến lực và độ cứng cao để thực hiện các tác vụ gia công.
7/ Robot Kiểm tra: Thường kết hợp với hệ thống thị giác để kiểm tra chất lượng sản phẩm.
Việc phân loại này giúp các nhà sản xuất và người dùng lựa chọn loại cánh tay robot phù hợp nhất với nhu cầu cụ thể. Hãy liên hệ ngay VNTECH để được tư vấn chi tiết về loại cánh tay robot tự động phù hợp nhất với doanh nghiệp của bạn.

Phân loại theo số trục
Cánh tay robot cũng thường được gọi tên theo số trục mà chúng có:
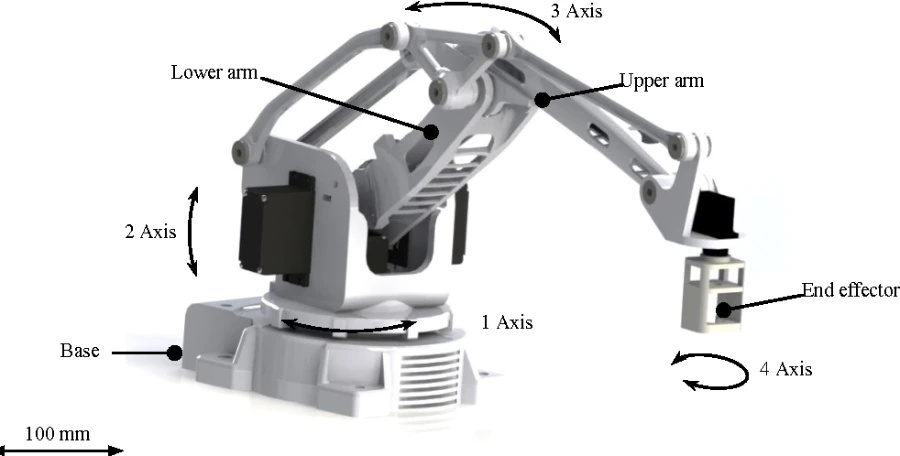
1/ Robot 4 Trục: Các khớp di chuyển trong mặt phẳng ngang (X, Y) và một chuyển động lên/xuống (Z), cùng với một khả năng xoay quanh trục Z.
– Khả năng: Linh hoạt trong một mặt phẳng, tốc độ cao cho các tác vụ gắp đặt.
– Ứng dụng: Lắp ráp linh kiện nhỏ, gắp và đặt tốc độ cao, đóng gói, phân loại sản phẩm trên băng chuyền.
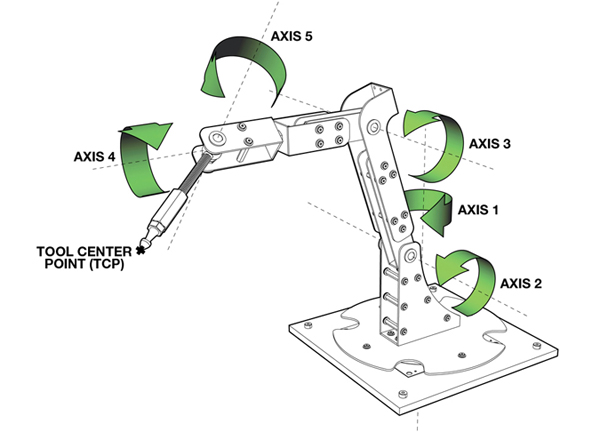
2/ Robot 5 Trục mang lại sự linh hoạt cao hơn robot 4 trục nhưng vẫn còn hạn chế về khả năng định hướng hoàn toàn trong không gian 3D.
– Khả năng: Có thể thực hiện các nhiệm vụ phức tạp hơn so với robot 4 trục, nhưng đôi khi gặp khó khăn trong việc tiếp cận các hướng nhất định.
– Ứng dụng: Hàn điểm, nạp liệu máy, xử lý vật liệu mà không yêu cầu định hướng dụng cụ cuối một cách hoàn chỉnh.
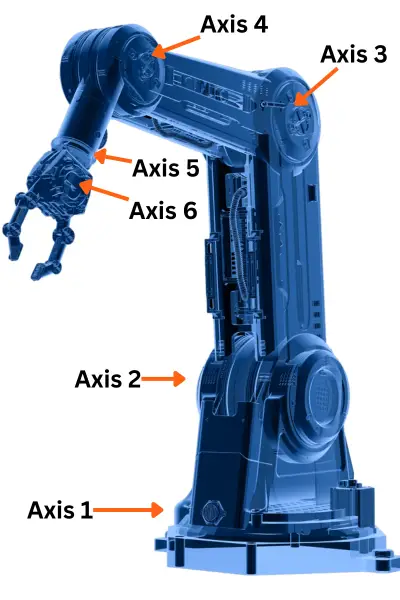
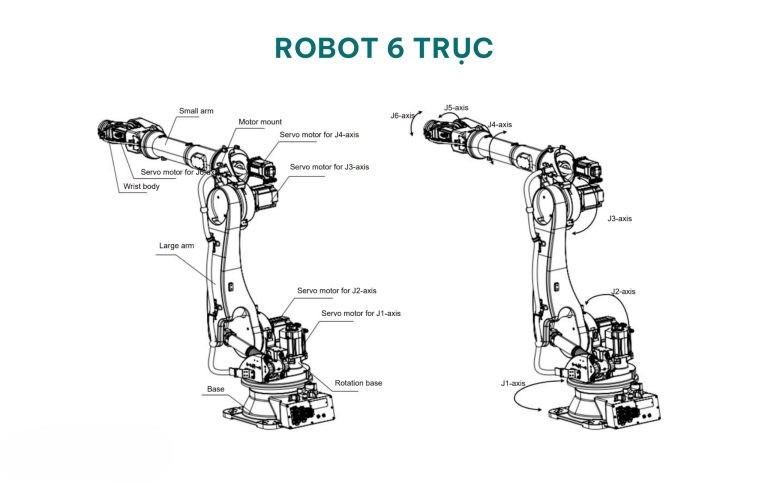
3/ Robot 6 Trục: Với 6 khớp quay độc lập, nó có khả năng di chuyển bộ phận cuối đến bất kỳ vị trí nào và định hướng nó theo bất kỳ hướng nào trong không gian 3 chiều (tương tự như cánh tay người).
– Khả năng: Cực kỳ linh hoạt, có thể tiếp cận không gian chật hẹp, thực hiện các thao tác phức tạp, tinh vi.
– Ứng dụng: Hàn hồ quang, phun sơn, lắp ráp phức tạp, mài, đánh bóng, kiểm tra chất lượng, xử lý vật liệu nặng và bất kỳ tác vụ nào đòi hỏi sự khéo léo, linh hoạt cao.
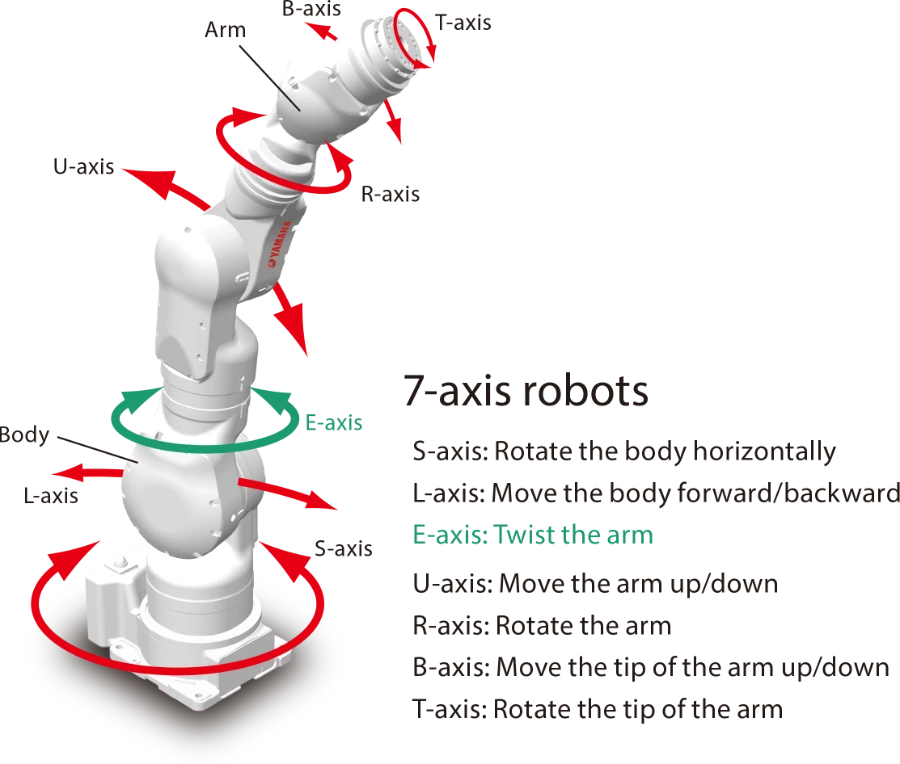
4/ Robot 7 Trục hoặc hơn): Trục bổ sung này thường được thêm vào để tăng cường khả năng di chuyển xung quanh vật cản hoặc để cải thiện vùng làm việc và khả năng tiếp cận.
– Khả năng:
+ Cực kỳ linh hoạt, có thể tránh va chạm một cách hiệu quả hơn.
+ Lý tưởng cho môi trường làm việc phức tạp hoặc các ứng dụng đòi hỏi sự khéo léo cao nhất.
– Ứng dụng:
+ Các robot cộng tác đôi khi có 7 trục để tăng tính linh hoạt khi làm việc cùng con người.
+ Hoặc trong các ứng dụng đòi hỏi vượt qua chướng ngại vật trong không gian chật hẹp.
Việc lựa chọn số trục phù hợp cho cánh tay robot phụ thuộc vào độ phức tạp của nhiệm vụ, không gian làm việc và ngân sách đầu tư. Robot có nhiều trục hơn thường đắt hơn và yêu cầu lập trình phức tạp hơn, nhưng bù lại mang lại sự linh hoạt và khả năng ứng dụng cao hơn.
Ứng dụng của cánh tay Robot
Cánh tay robot đã cách mạng hóa nhiều ngành công nghiệp, mang lại hiệu quả vượt trội trong các quy trình sản xuất.
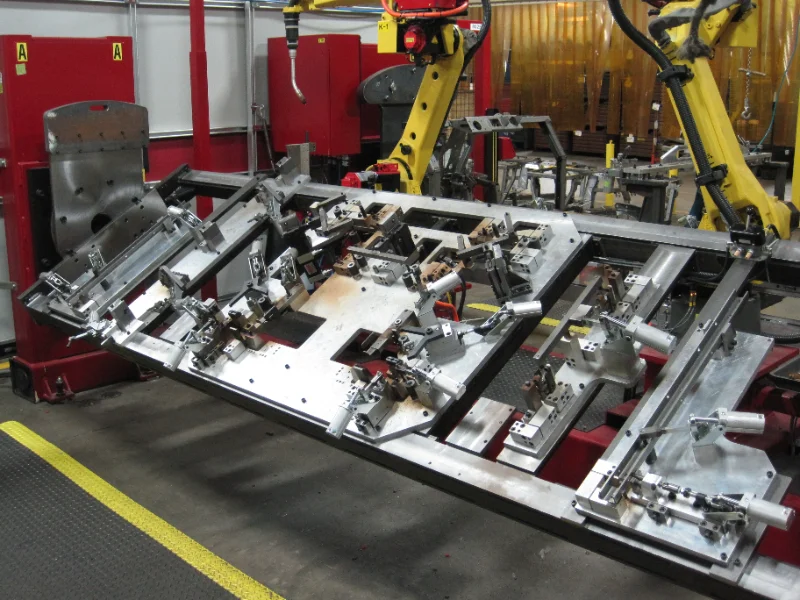
- Trong Sản Xuất Ô Tô: Đây là một trong những ngành tiên phong và ứng dụng robot nhiều nhất.
- Hàn điểm và hàn hồ quang: Đảm bảo độ chính xác và tốc độ cao.
- Sơn: Phun sơn đồng đều, tiết kiệm vật liệu.
- Lắp ráp: Lắp ráp các bộ phận lớn như động cơ, cửa xe, và các linh kiện nhỏ trong cabin.
- Xử lý vật liệu: Di chuyển thân xe giữa các công đoạn sản xuất.
>>> Xem thêm: 10 ngành công nghiệp có thể ứng dụng cánh tay robot

- Trong Ngành Điện Tử: Với yêu cầu về độ chính xác và tốc độ cao cho các linh kiện nhỏ, robot là không thể thiếu:
- Gắp và đặt: Lắp ráp chip, linh kiện trên bảng mạch PCB.
- Kiểm tra chất lượng: Sử dụng hệ thống thị giác để kiểm tra lỗi, khuyết tật trên sản phẩm.
- Dán keo, phân phát vật liệu: Dán keo chính xác trên các thiết bị nhỏ.
- Trong Ngành Gia Công Kim Loại: Cánh tay robot mang lại hiệu quả vượt trội trong các công đoạn xử lý kim loại:
- Hàn: Cải thiện chất lượng mối hàn, tăng năng suất.
- Cắt: Cắt plasma, laser, hoặc waterjet với độ chính xác cao.
- Mài và đánh bóng: Tự động hóa các công đoạn hoàn thiện bề mặt sản phẩm.
- Đột dập, uốn: Nạp liệu và lấy sản phẩm tự động từ máy đột dập, máy uốn.

- Trong Ngành Thực Phẩm và Đồ Uống: Đảm bảo vệ sinh an toàn thực phẩm và tăng tốc độ đóng gói:
- Gắp đặt và phân loại: Xếp sản phẩm vào bao bì, phân loại trái cây, rau củ.
- Đóng gói và xếp pallet: Đóng hộp, dán nhãn, xếp các thùng hàng lên pallet.
- Xử lý nguyên liệu: Di chuyển nguyên liệu thô trong môi trường được kiểm soát.

- Trong Đóng Gói và Logistics: Robot giúp tối ưu hóa quy trình hậu cần:
- Xếp dỡ pallet (Palletizing/Depalletizing): Tự động xếp hoặc dỡ hàng hóa lên/xuống pallet.
- Phân loại hàng hóa: Sắp xếp bưu kiện theo địa điểm, kích thước.
- Đóng gói thứ cấp: Đóng gói sản phẩm vào thùng carton.

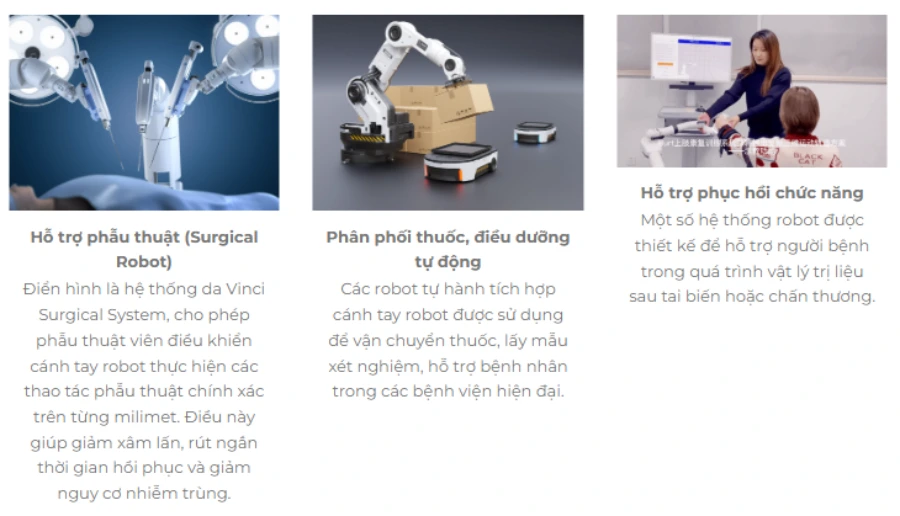
- Trong Y Tế và Dược Phẩm: Đòi hỏi sự chính xác, vô trùng và giảm thiểu rủi ro cho con người:
- Hỗ trợ phẫu thuật: Cánh tay robot có độ chính xác cao hỗ trợ bác sĩ trong các ca phẫu thuật phức tạp.
- Phân tích phòng thí nghiệm: Xử lý mẫu, pha chế thuốc.
- Đóng gói dược phẩm: Đảm bảo môi trường vô trùng.
Kết luận:
Trong tương lai, cánh tay robot hứa hẹn sẽ ngày càng thông minh, tự chủ và dễ tiếp cận hơn. Chúng sẽ không chỉ là công cụ trong các nhà máy mà còn trở thành những trợ lý đắc lực trong nhiều khía cạnh của đời sống, hướng tới một cuộc sống tốt đẹp hơn thông qua tự động hóa.
Câu hỏi liên quan về cánh tay robot
Dưới đây là các câu hỏi phổ biến và cốt lõi nhất mà các chủ xưởng cũng như người đọc quan tâm khi tìm hiểu về cánh tay robot công nghiệp, kèm theo câu trả lời ngắn gọn, dễ hiểu:
Số trục (bậc) của cánh tay robot có ý nghĩa gì?
Trả lời: Số trục đại diện cho các khớp chuyển động và độ linh hoạt của robot.
- Robot càng nhiều trục thì càng thực hiện được những hoạt động phức tạp.
- Trong ngành cơ khí và hàn, robot 6 trục là tiêu chuẩn vàng.
- Có thể mở rộng lên 8 trục hoặc 9 trục khi kết hợp thêm hệ thống ray trượt hoặc cổng trục để xử lý hàng siêu trường.
Cánh tay robot làm được những công việc gì?
Trả lời: Cánh tay robot cực kỳ đa năng, tùy thuộc vào công cụ (mỏ hàn, đầu cắt, giác hút) gắn ở đầu cánh tay:
- Hàn tự động: Hàn MIG/MAG, TIG, hàn Laser cho dầm thép, khung xe.
- Cắt gia công: Cắt plasma, cắt laser các chi tiết kim loại tấm.
- Bốc xếp hàng: Nâng hạ, phân loại và sắp xếp thùng hàng nặng.
- Sơn và phun phủ: Phun sơn bề mặt đồng đều trên ô tô, thiết bị gia dụng.
Sử dụng cánh tay robot có khó không? Có phải biết lập trình không?
Trả lời: Không khó.
- Người vận hành không cần phải giỏi code hay lập trình phức tạp.
- Nhờ tính năng “Teach-less”, máy có thể tự động đọc bản vẽ 3D hoặc tự động quét phôi để tính toán đường đi.
- Một người thợ bình thường chỉ cần 1 ngày đào tạo là có thể đứng máy vận hành thành thạo.
Độ chính xác của cánh tay robot cao đến mức nào?
Trả lời: Độ chính xác lặp lại của robot công nghiệp cực kỳ cao (Sai số chỉ 0.05 mm).
- Robot có thể duy trì sự chính xác này liên tục cho hàng vạn sản phẩm.
Doanh nghiệp nhận được lợi ích gì khi đầu tư cánh tay robot?
Trả lời: Có 4 lợi ích thực tế lớn nhất:
- Tiết kiệm nhân công: 1 người vận hành có thể điều khiển cùng lúc 4 cánh tay robot.
- Tăng sản lượng: Robot có thể làm việc bền bỉ 24/7 không nghỉ, không giảm năng suất vào cuối ca.
- Đảm bảo chất lượng: Sản phẩm ra xưởng đồng đều, mối hàn đẹp “10 vạn cái như một”, đạt chuẩn xuất khẩu mà không tốn chi phí mài sửa hậu kỳ.
- An toàn lao động: Thay thế con người làm việc trong môi trường độc hại (khói hàn, tia lửa, hóa chất).
Tuổi thọ của cánh tay robot là bao lâu?
Trả lời: Một cánh tay robot có thể vận hành ổn định từ 10 đến 15 năm nếu được bảo dưỡng định kỳ đúng cách.
- Thay dầu khớp, vệ sinh bép hàn, kiểm tra hệ thống làm mát,…
Cánh tay robot đã và đang là công nghệ xương sống của ngành công nghiệp hiện đại, mang lại những cải tiến vượt bậc về năng suất, chất lượng và an toàn. Từ những cỗ máy thô sơ ban đầu, chúng đã phát triển thành những hệ thống thông minh, linh hoạt, có khả năng thực hiện hàng loạt các nhiệm vụ phức tạp trên nhiều lĩnh vực.
VNTECH - Đơn vị cung cấp máy móc gia công cơ khí chính hãng, uy tín, đa dạng về chủng loại, đáp ứng mọi nhu cầu sản xuất. Để được tư vấn chi tiết và nhận báo giá tốt nhất, quý khách vui lòng liên hệ theo thông tin bên dưới.
________________
THÔNG TIN LIÊN HỆ
- Địa chỉ văn phòng:
- Địa chỉ Hà Nội: NO-05A23, Khu/Ngõ 1 Nguyễn Khắc Viện, Khu tái định cư Giang Biên, Hà Nội
- Chi Nhánh Đà Nẵng: Lô 11, Khu A4, Nguyễn Sinh Sắc, Hoà Minh, Liên Chiểu, Đà Nẵng
- Chi Nhánh HCM: 43 Đường N2, KP Thống Nhất, Dĩ An, Bình Dương
- SĐT: 0984.537.333
- Email: sale@vntechcnc.vn
- Facebook: https://www.facebook.com/vntechcnc
- Website: https://thietbivntech.vn